728x90
반응형
"DC 모터를 활용한 교육용 로봇 만들기"
내용:
1. 소개
교육용 장난감으로서의 로봇 프로젝트 소개
로봇 공학에 입문하고자 하는 학생들에게 추천하는 프로젝트 소개
2. 로봇의 역할과 응용 분야
로봇의 정의와 주요 역할 소개
로봇이 업무뿐만 아니라 교육과 오락에도 활용되는 다양한 분야 소개
3. DC 모터 진동을 활용한 로봇 동작 원리
DC 모터의 진동을 통해 로봇이 움직이는 방식 설명
구부러진 튜브를 활용하여 DC 모터에 규칙적인 진동을 발생시키는 방법 설명
4. 프로젝트의 3D 모델과 회로 시뮬레이션
Tinkercad를 활용한 프로젝트의 3D 모델 및 회로 시뮬레이션 소개
프로젝트 건축 자재 및 구현
프로젝트 구현에 필요한 건축 자재 소개
단계별로 프로젝트를 구현하는 방법과 주의사항 설명


이것은 단순한 로봇이 아니라 교육용 장난감이며 로봇 공학에 입문할 의향이 있는 학생이라면 이 놀라운 것을 만들어 보는 것이 좋습니다.
로봇은 주로 일을 도와주는 기계일 뿐이며, 로봇의 역할을 업무뿐만 아니라 교육과 오락에도 전념할 수 있습니다.
재미있는 조립 외에도 이를 조립하는 과정을 통해 몇 가지 기계적 개념과 함께 물리학 및 전자공학의 많은 영역에서 실습 경험을 할 수 있습니다.
우선이 로봇이 무엇인지에 대한 크림 레이어 설명을 제공하겠습니다.
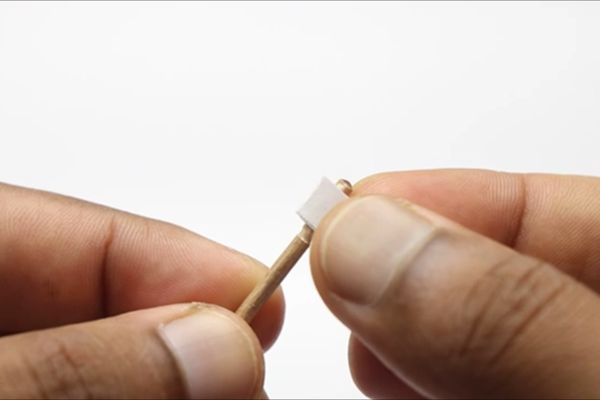
이 로봇은 DC 모터의 진동을 사용하여 움직입니다.
이제 DC 모터가 어떻게 진동을 발생시킬 수 있는지 궁금할 수 있습니다., 대답은 간단합니다 샤프트의 규칙적인 부드러운 회전에 방해를 만들기 위해 끝이 구부러진 작은 튜브를 추가했습니다.
이 장애물은 로봇을 움직이기에 충분한 진동을 일으킵니다
이 프로젝트의 3D 모델과 회로 시뮬레이션은 Tinkercad로 제작되었습니다.
이 말과 함께 이 프로젝트의 건축 자재에 직접 뛰어들겠습니다.
공급





- 직류 전동기
- 이쑤시개
- 사용한 펜 리필의 튜브
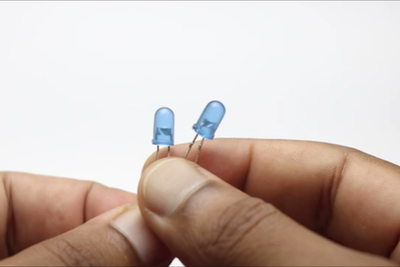
- LED 전구x2
- 리튬 이온 배터리
- 종이 몇 장
- 뜨거운 접착제
- 종이 접착제
- 팅커카드
- 3D 프린터
- Cura와 같은 슬라이싱 소프트웨어
- PLA 필라멘트
- 이 프로젝트를 구축하기 위한 시간
1단계: Tinkercad를 사용한 로봇 차체 설계
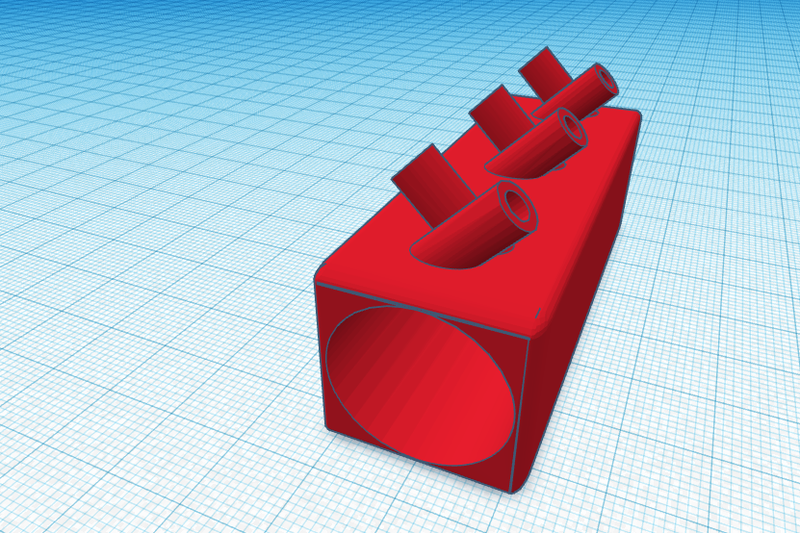


Tinkercad를 사용하여 이 로봇의 차체를 설계했는데, 마침내 완전히 작동하는 모델을 내놓기까지 몇 번의 시행착오가 필요했습니다.
모델은 매우 간단하며 예를 들어 리튬 이온 배터리, DC 모터 및 LED 크기가 보편적이므로 모든 사람이 이 디자인을 3D 프린팅에 사용할 수 있도록 표준 크기의 구성 요소를 고려하여 설계했습니다.
배터리가 프레임에 직접 삽입되어 공간을 절약할 수 있습니다.
프로젝트에서 내 모델을 직접 사용할 수 있습니다., 아래에 STL 파일을 제공했으니, 파일을 다운로드하여 슬라이스를 시작하기만 하면 됩니다.
frontface.stl
0.16MB
Robot+main+frame.stl
0.38MB
backcoverrobot.stl
0.08MB
2단계: 3D 프린팅

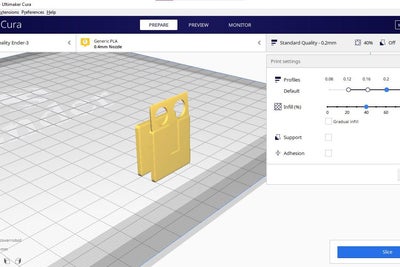
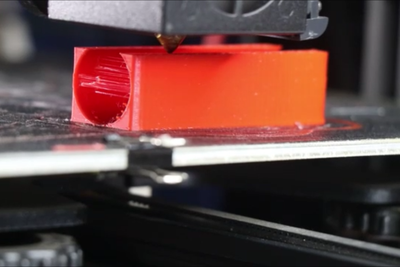



이것은 내가 가장 좋아하는 부분이며, 디지털에서 물리적 모델은 놀랍게 느껴집니다.
Cura 소프트웨어를 사용하여 모델을 슬라이스했으며 이 단계에서 프린트 베드에 디자인을 배치하기 위한 이미지를 볼 수 있습니다.
3D 프린팅을 위한 뗏목이나 지지대가 필요하지 않으며 30-40% 충전률로 직접 프린팅할 수 있습니다.
PLA 필라멘트의 색상은 그대로 두었지만 빨간색과 노란색을 선택했습니다.
3 단계 : 다리 만들기




제가 사용했던 이쑤시개는 잘 맞았지만 다리가 부러졌을 때를 대비하여 다리를 교체할 수 있도록 하고 싶었기 때문에 필요한 경우 쉽게 분리할 수 있도록 종이 스트립을 사용했습니다.
이것을 만들기 위해 내가 한 일은 종이 조각을 이쑤시개 끝으로 굴리고 종이 접착제를 사용하여 고정하는 것뿐이었습니다.
나를 위해 스트립의 크기는 0.8cm x 2.5cm였습니다.
잠시 동안 말리고 로봇의 다리가 될 6 개의 조각을 만들었습니다.
4단계: 다리 조립




이것은 이 프로젝트의 쉬운 부분이며, 우리는 이미 6개의 다리를 모두 준비했습니다.
이 과정에서 접착제가 필요하지 않으며 다리가 완벽하게 미끄러지며 약간의 추가 압력으로 다리를 프레임에서 쉽게 빼낼 수 있습니다.
6개의 다리가 모두 몸에 부착될 때까지 단계를 반복합니다.
5 단계 : 배터리 추가





이 로봇에 전원을 공급하기 위해 저는 매우 오랜 시간 동안 전원을 백업할 수 있는 리튬 이온 배터리를 선택했습니다.
배터리 끝을 긁고 나중에 양극을 먼저 납땜한 다음 이 배터리를 프레임에 삽입했습니다.
뜨거운 접착제로 다른 쪽 끝/뒤쪽 끝을 고정한 다음 뒷 덮개로 밀봉합니다.
이것으로 회로의 전반부가 완료되었으며 이제 나머지 절반을 볼 수 있습니다.
6단계: Tinkercad 시뮬레이션 회로 및 연결






더 나은 이해를 위해 Tinercad Circuits를 사용하여 시뮬레이션을 만들었습니다.
이 로봇에 사용되는 회로는 매우 기본적이며, 배터리의 양극과 LED 전구를 배터리에 직접 연결하고 음극은 스위치를 통해 연결합니다.
또한 이 단계에서 볼 수 있는 이 회로에 대한 작은 시뮬레이션을 만들었습니다
병렬 유형의 연결을 사용하여 2개의 LED를 함께 연결할 수 있습니다.
뜨거운 접착제를 사용하여 DC 모터를 프레임에 연결하십시오.
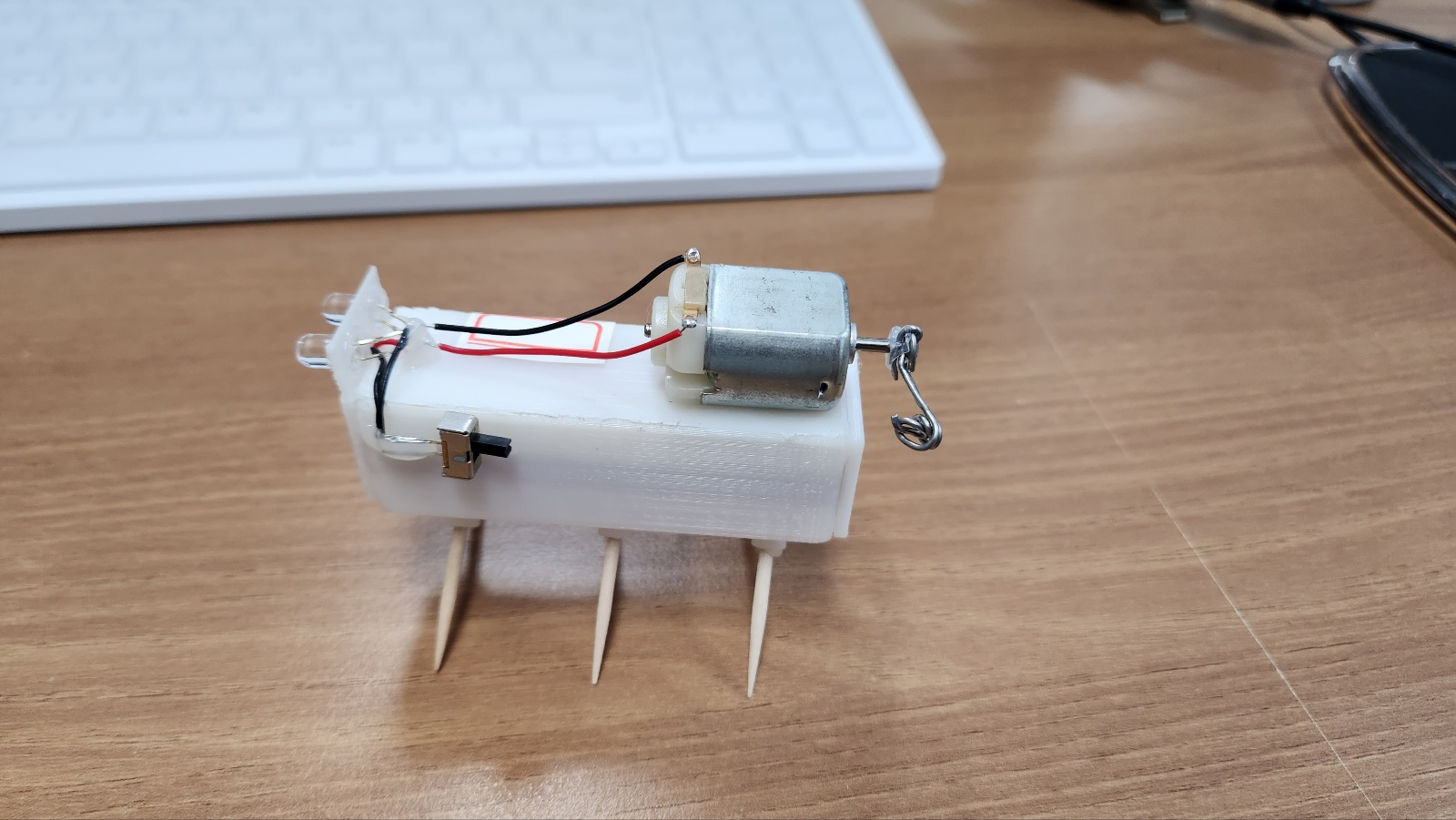
7단계: 마무리






이제 로봇의 뒷면 작업을 완료했으므로 회로와 함께 앞부분이 있습니다.
배터리의 다른 쪽을 납땜하고 나중에 위의 회로도에 따라 LED를 납땜합니다.
전원을 제어하기 위해 일반 켜기 및 끄기 스위치를 사용하고 회로에 따라 와이어를 납땜하고 로봇 프레임의 끝을 뜨거운 접착제로 마무리합니다.
우리는 PLA 재료를 다루고 있으므로 접착제의 온도가 중간인지 확인하십시오.
8 단계 : 사용 방법



이것을 사용하는 것은 큰 일이 아니므로 사용하지 않을 때는 항상 진동을 유발하는 튜브를 꺼내는 것이 좋습니다.
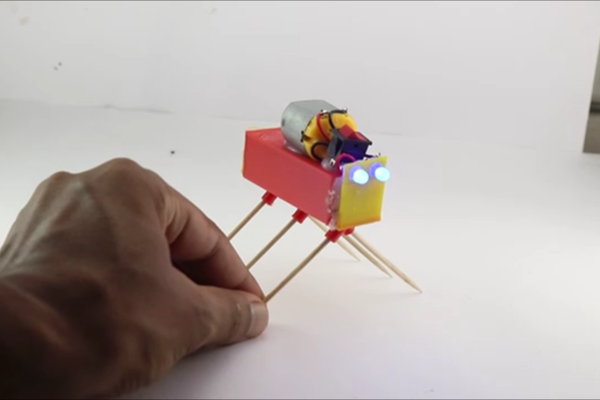
로봇을 시작하려면 먼저 튜브를 삽입한 다음 버튼을 켜고 로봇을 평평한 표면에 두십시오.
나는 이 로봇을 나무 테이블과 내 방의 타일에 시험해 보았고 두 표면 모두에서 가장 잘 작동합니다.
LED 조명은 이제 이 로봇에 좋은 관심을 더하고 이 로봇을 끄려면 LED 전구 쪽에서 로봇에 생명을 불어넣고 버튼을 끈 다음 나중에 튜브를 꺼내기만 하면 됩니다.
한 번의 충전으로 이 로봇은 매우 오랫동안 작동하며 배터리를 충전하기 위해 뒷면 케이스를 열고 배터리를 충전한 다음 다시 삽입할 수 있습니다.
이 프로젝트가 마음에 들었다면 가족이나 친구와 함께 여가 시간을 내어 이 프로젝트를 구축하는 것을 고려하면 결과가 확실히 마음에 들 것입니다.



728x90
반응형
'모빌리티 프로젝트' 카테고리의 다른 글
| 재활용 종이 박스 자동 판매기-Cardboard Vending Machine (1) | 2023.11.27 |
|---|---|
| 크리스마스 트리, 2023. (1) | 2023.11.19 |
| CNC 드로잉 머신 만들기(How to Make CNC Drawing Machine) (0) | 2023.11.17 |
| STEM Project-Based Learning : 최고의 고무 밴드 자동차 (The Best Rubber Band Car) (0) | 2023.11.11 |
| 프로젝트 기반 학습: 레이스 팀 및 프로토타입 자동차를 엔지니어링 하는 방법 (0) | 2023.11.11 |



