프레임리스 레이저 하프 제작: 꿈을 현실로!
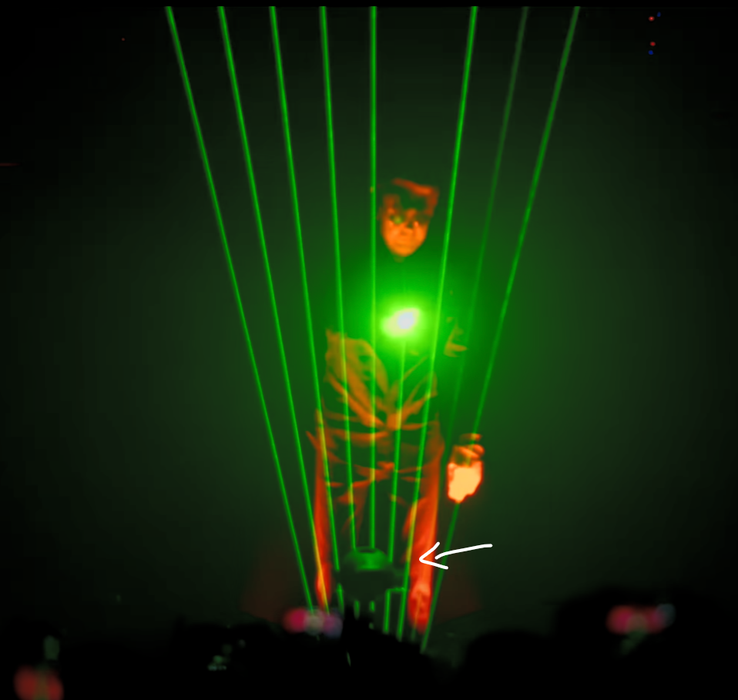
몇 달간의 시행착오, 모터 조정 및 미세 조정 끝에, 꿈꾸던 프레임리스 레이저 하프가 마침내 작동했습니다! 어린 시절 TV에서 전설적인 Jean-Michel Jarre의 상징적인 레이저 하프를 보며 상상했던 그 감동이 이번 프로젝트로 되살아났습니다. 직접 제작한 이 레이저 하프는 실제 음악을 연주할 수 있으며 그 시각적 효과 또한 놀랍습니다.

프레임리스 레이저 하프의 핵심 요소
이 레이저 하프는 Arduino 제어 시스템으로 동작하며, 모터와 레이저 빔을 조합하여 빔 중단을 감지하는 스마트한 센서 설정이 적용되었습니다. 아래는 프로젝트를 완성하기 위해 준비한 주요 구성 요소입니다:
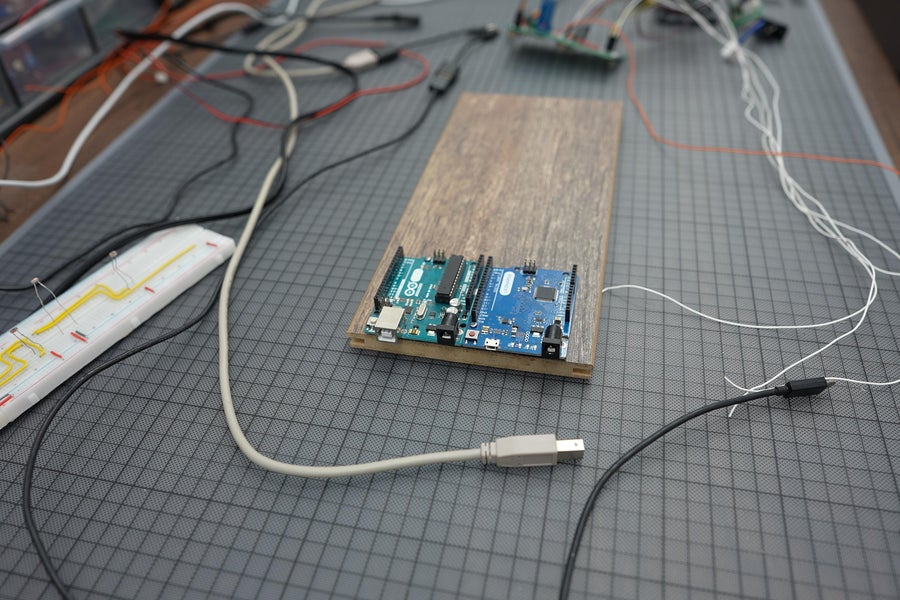
- Arduino UNO & Arduino Leonardo
- 스테퍼 모터(39BYG53322)
- 3W TTL 레이저
- 초음파 센서
- 광 종속 저항기(LDR)
- 적외선 반사 센서(TCRT5000)
제작 과정: 단계별 가이드
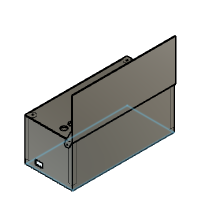
- 3D 모델 제작: Fusion 360 파일을 사용하여 모든 부품을 설계 및 출력했습니다.
- 베이스 보드 준비: 나무 판을 사용해 안정성을 강화하고 모터의 진동을 완화했습니다.
- 모터와 센서 조립: 스테퍼 모터와 반사용 거울을 설치해 빔의 이동과 정밀성을 확보했습니다.
- 레이저와 전원 연결: 안전을 위해 릴레이를 추가하여 레이저의 전원을 제어했습니다.
- 최종 조립 및 테스트: 모든 구성 요소를 보드에 고정하고 프로토타이핑으로 작동을 확인한 뒤, Arduino 코드를 업로드했습니다.
레이저 하프의 안전 경고
⚠️ 강력한 레이저 주의 ⚠️
이 프로젝트에는 3W 레이저가 사용되므로 항상 인증된 레이저 고글을 착용하고, 레이저 경로를 명확히 하며 안전한 환경에서 작업해야 합니다. 레이저는 잘못 취급될 경우 영구적인 눈 및 피부 손상을 초래할 수 있으니 안전 절차를 철저히 준수해주세요.
자세한 레이저 안전 정보는 다음 링크에서 확인할 수 있습니다:
- 레이저 안전 가이드 - Makezine
- MIT 레이저 안전 가이드
공급
1 x 아두이노 레오나르도
1 x 아두이노 우노
4 x 광 종속 저항기 LDR
2 x 초음파 센서 US-100
1 x NEMA 16 39MM 1.8도 2상 4선식 하이브리드 얇은 스테퍼 모터
경고:
저는 오래된 39D 프린터에서 회수한 53322BYG3 스테퍼 모터를 사용하고 있습니다. 불행히도 아마존이나 알리익스프레스에서 찾을 수 없었습니다. NEMA 16, 39mm, 1.8도, 2상, 5선식 하이브리드 스테퍼 모터입니다.
1 x 릴레이 모듈
1 x 12v 전원 공급 장치 - 나는 이와 비슷하게 사용합니다 : https://amzn.to/3RaaXPv
1 x 레이저 - 3W TTL
4 x10옴 저항기
1단계: 3D 모델 인쇄
Fusion 360 소스 파일도 필요에 따라 수정할 수 있습니다.
첨부 파일





2단계: 베이스 보드 준비
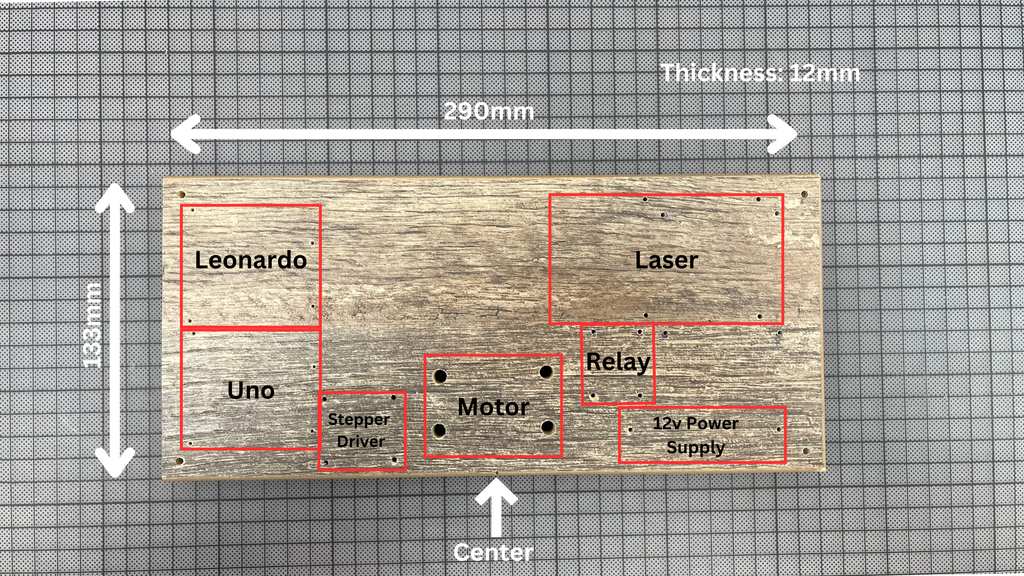
지정된 치수의 모든 나무 보드가 작동합니다. 3D 프린팅 제품보다 안정성이 우수하고 모터의 진동을 완화하는 데 도움이 됩니다.
3단계: 스테퍼 모터 제어 방법 배우기
(이미 스테퍼 모터를 제어하는 데 자신이 있다면 이 단계를 건너뜁니다.)
***
스테퍼 모터는 하프에서 레이저 바로 다음으로 중요한 구성 요소이지만 제대로 하는 것이 가장 어려운 것으로 판명되었습니다. 사용 가능한 스테퍼 모터의 종류가 매우 다양하기 때문에 각 모터에는 고유한 설정 및 제어 방법이 필요합니다.
가장 인기 있는 유형은 단극, 양극 및 하이브리드 스테퍼 모터입니다. 모터의 유형에 따라 다른 드라이버(모터를 제어하는 하드웨어 장치)와 프로그래밍이 필요합니다.
DroneBot Workshop의 멋진 소개 비디오가 있으며, 이 비디오는 스테퍼 모터로 작업하기에 충분한 배경 지식을 제공할 수 있습니다. 배선에 대해 찾은 또 다른 유용한 비디오는 이 비디오입니다.
***
모터 요구 사항은 1.8° 스텝 각도(즉, 회전당 200스텝)와 무게를 낮게 유지하기 위한 컴팩트한 크기로, 양방향으로 빠르고 정확한 움직임에 도움이 됩니다.
내 비디오에서 두 가지 유형의 모터와 두 가지 다른 드라이버를 사용한 것을 볼 수 있습니다.
- NEMA 17(42SHDC3025-24B)과 A4988 드라이버의 조합.
- ULN2003 드라이버와 페어링된 NEMA 16(39BYG53322) 스테퍼 모터. (이것은 더 빠르고 반응성이 뛰어난 움직임을 허용하는 더 가볍고 짧은 로터로 인해 더 나은 옵션이었습니다.)
나는 마침내 불행히도 매우 인기가 없는 하이브리드 NEMA 16(39BYG53322)을 고수했습니다. 그러나 내가 말했듯이 모터의 유형보다 크기가 더 중요하므로 다른 유형의 NEMA 16을 사용할 수 있습니다.
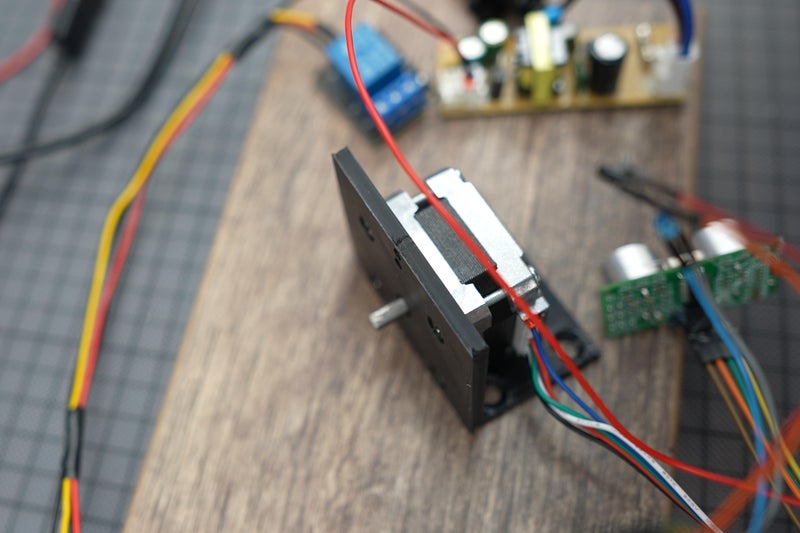
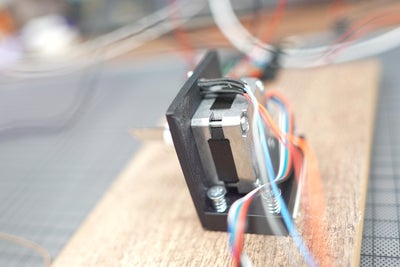
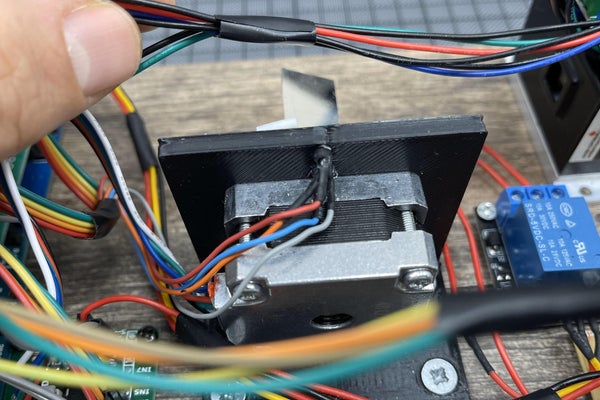
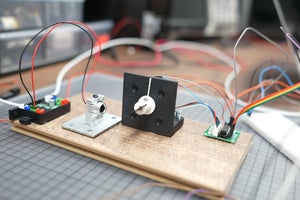
4단계: 스테퍼 모터를 스탠드에 장착
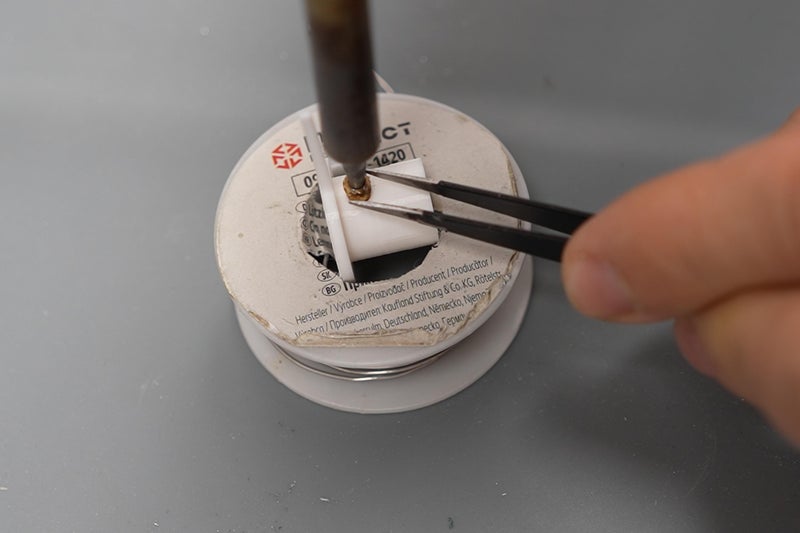
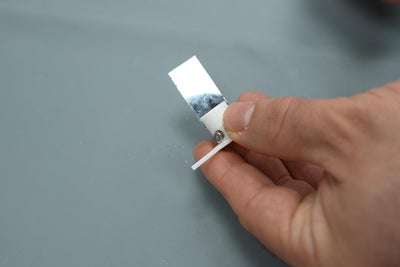
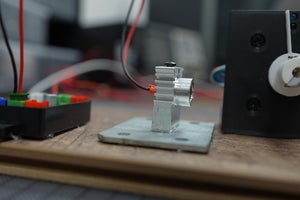
5단계: 거울 조각 잘라내기





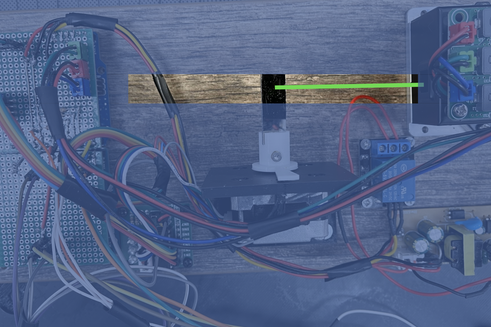
거울로 실험을 많이 했어요. 거울은 가능한 한 얇아야 합니다. 그렇지 않으면 초점이 맞지 않는 빔을 반사합니다. 내가 가장 잘 작동하는 것으로 발견 된 것은 오래된 하드 드라이브의 디스크입니다. 나는 Dremel을 사용하여 그것을 잘라내고 모양을 만들었습니다. 사진에서 미러와 하드 드라이브 디스크 사이의 반사 빔의 차이를 볼 수 있습니다.
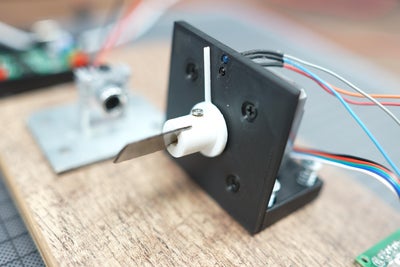
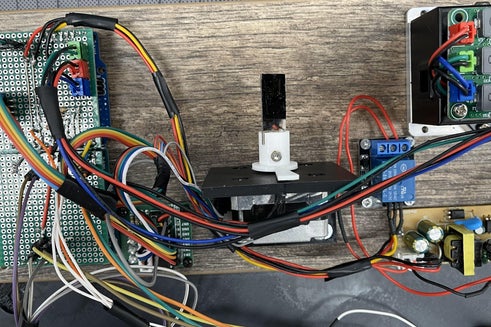
6단계: 미러 홀더 조립
- 홀더에 나사산 인서트를 추가합니다(이 단계는 선택 사항이며 대신 표준 나사를 사용할 수도 있음).
- 약간의 접착제로 거울을 거울 홀더에 부착합니다.
- 홀더를 모터에 장착합니다.
7단계: 루프백 센서 준비
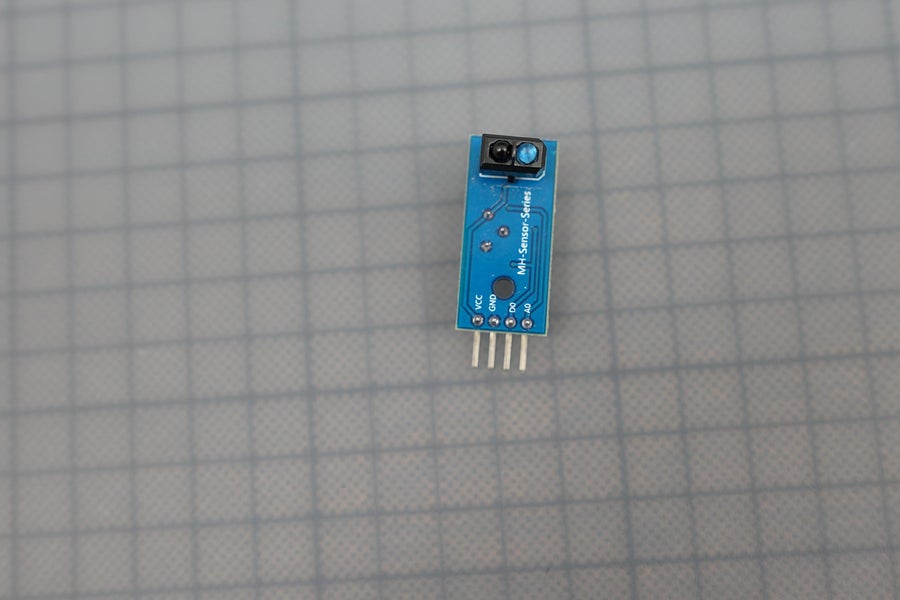
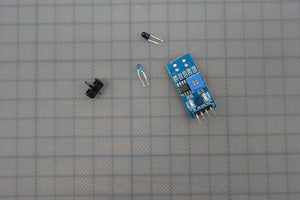
- 모듈에서 다이오드를 납땜 제거합니다.
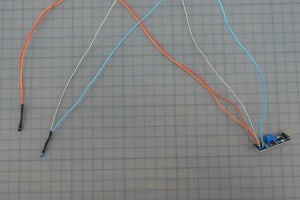
- 모터 스탠드에 닿을 수 있을 만큼 충분히 긴 전선을 사용하고 다이오드를 납땜하십시오.
8단계: 다이오드 따라가는 라인을 스탠드에 장착
뜨거운 접착제로 두 개의 다이오드를 구멍에 고정합니다.
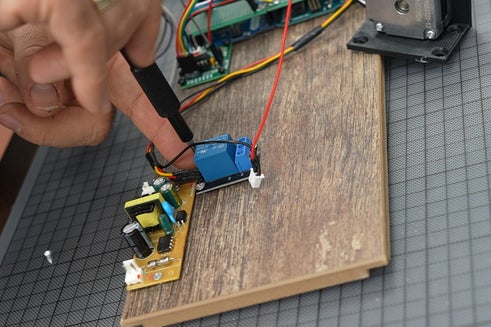
9단계: 레이저와 12V 전원 공급 장치 사이에 릴레이 추가
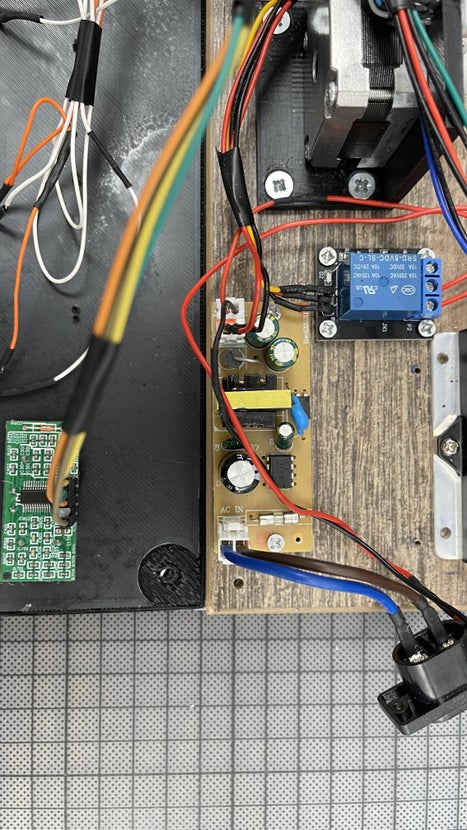
릴레이는 안전 조치로 필요합니다. Arduino가 실행 중이거나 재부팅되지 않을 때는 레이저에 PWM 신호를 보내지 않으므로 꺼져 있어야 할 때 최대 전력으로 실행됩니다. 이를 방지하기 위해 릴레이는 기본적으로 꺼져 있도록 연결해야 하며 Arduino는 모터 원점 복귀 절차를 완료한 후에만 전원을 켜야 합니다.
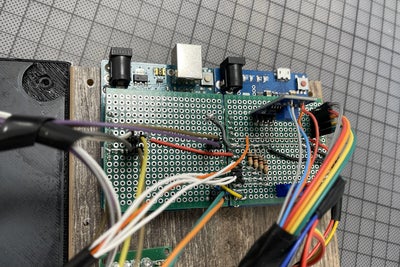
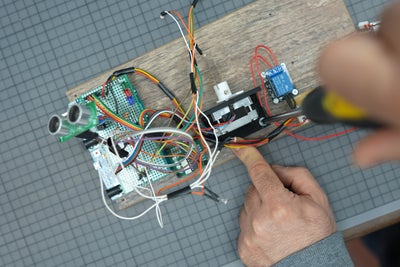
10단계: 프로토타이핑 보드를 사용하여 모든 배선 테스트
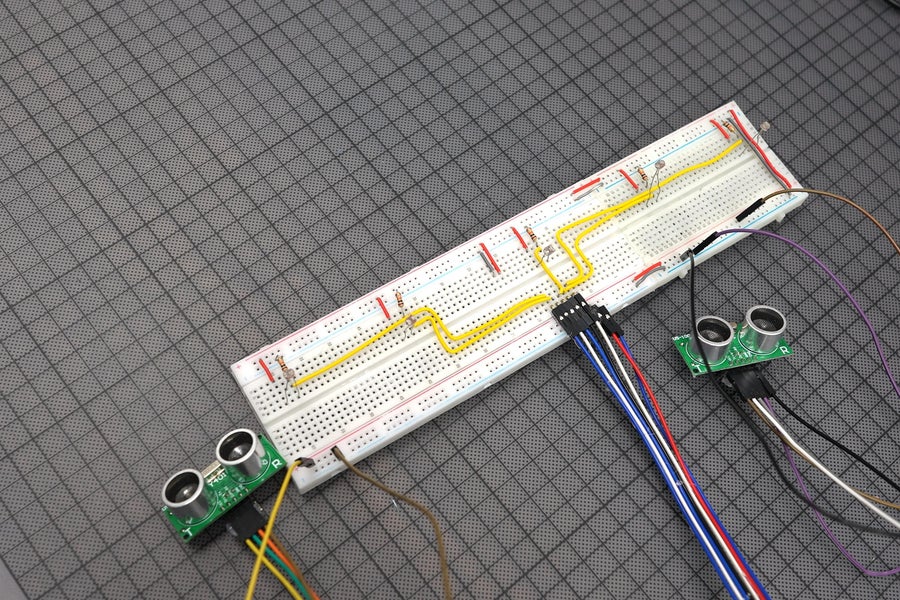
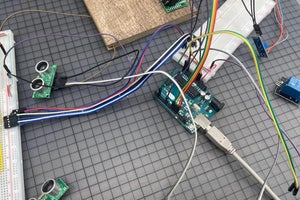
납땜을 진행하기 전에 ULN2003 dirver에 대한 회로도(여기)와 A4988 드라이버에 대한 회로도(여기)에 따라 프로토타이핑 보드로 설정을 테스트하는 것이 좋습니다.
구성 요소를 납땜하기 전에 저전력 레이저(약 100-200mW)로 회로를 실험해 보는 것이 좋습니다. 여전히 눈에는 위험하지만 3W 레이저는 최대 전력으로 작동할 때 어두운 표면도 태울 수 있습니다. 저전력 레이저를 사용하면 7개의 투영된 점이 보일 때까지 조정할 수 있습니다(비디오 참조). 고출력 레이저로 하프를 개발하는 것은 권장하지 않습니다—약한 레이저로 문제를 해결하는 것이 더 안전하고 쉽습니다. 항상 인증되고 적절한 등급의 보안경을 착용하는 것을 잊지 마십시오!
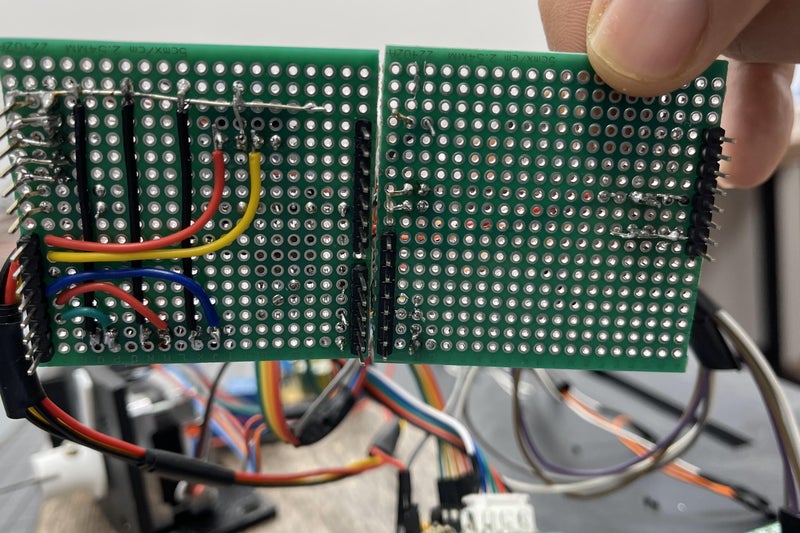
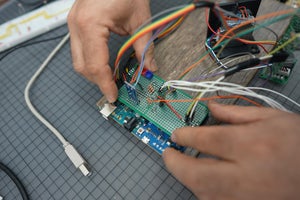
11단계: Arduinos 쉴드 생성
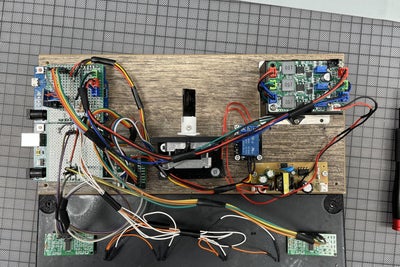
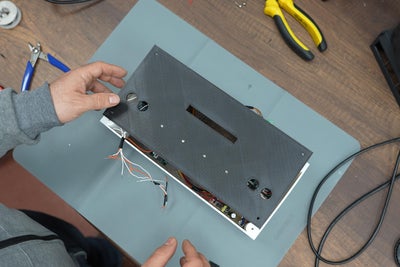
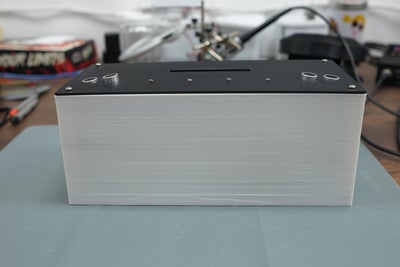
12단계: 구성 요소를 보드에 고정

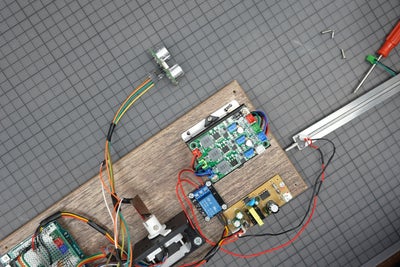

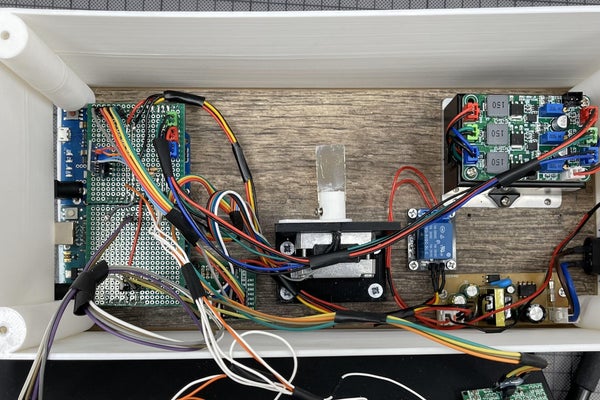
모터 스탠드와 레이저의 위치는 상단의 분할과 정렬되도록 중앙에 있어야 합니다. Arduino 보드는 출력이 노출되도록 왼쪽의 분할과 정렬되어야 합니다. 나머지 구성 요소는 그림에 따라 대략적으로 배치할 수 있습니다.
양면 테이프를 사용하여 임시로 보드에 부착할 수 있으며, 나사로 고정하기 전에 모든 것이 맞는지 확인할 수 있습니다. 그런 다음 펜으로 구멍을 표시하고 임시 테이프를 제거한 다음 구멍을 미리 뚫습니다.
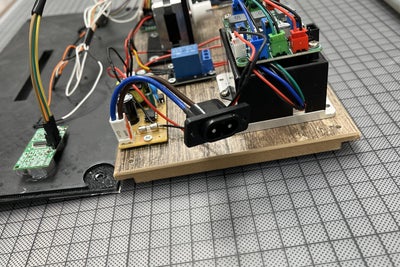
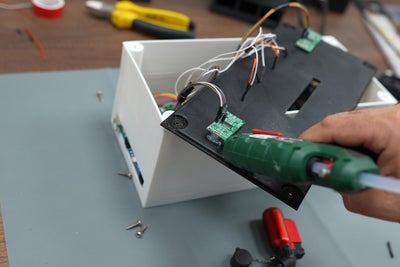
13단계: 나무 판자를 인클로저에 고정
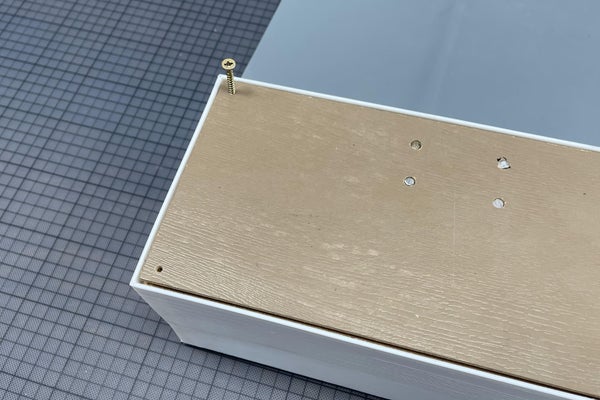
끝에 흰색 페인트가 칠해진 필라멘트 조각을 사용하여 인클로저의 구멍을 통과시키고 나무 판에 드릴 지점을 표시할 수 있습니다. 그런 다음 구멍을 뚫고 나사로 보드를 인클로저에 고정합니다.
14단계: 인클로저 덮개에 센서 장착
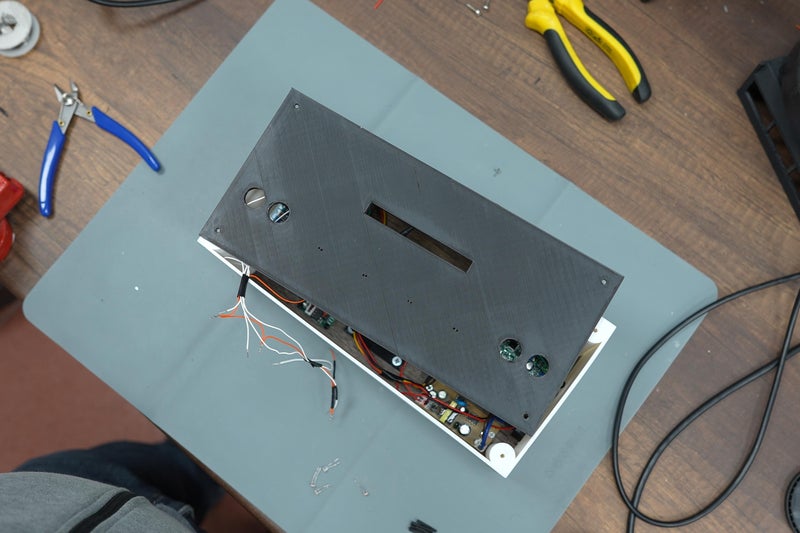
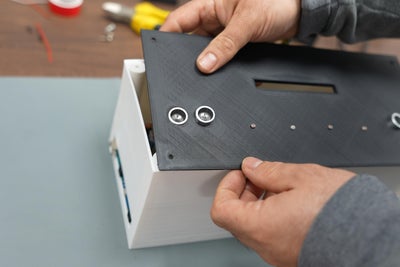
- 4개의 광 센서를 삽입하고 반대쪽의 실드로 이어지는 전선에 납땜합니다.
- 뜨거운 접착제로 사운드 센서를 고정합니다.
- 뚜껑을 장착합니다.
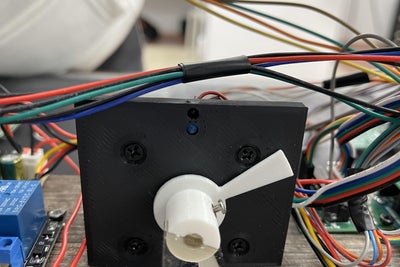
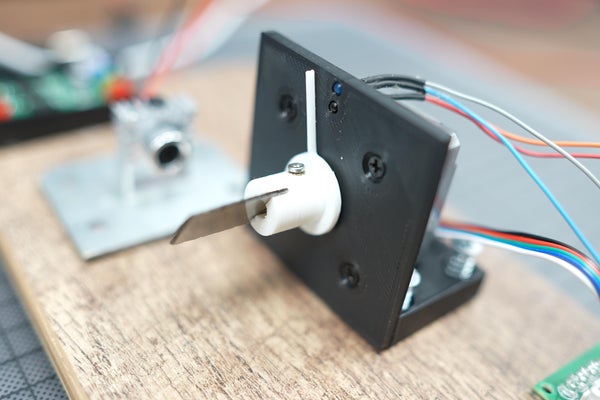
15단계: 반사 부착물을 장착합니다.
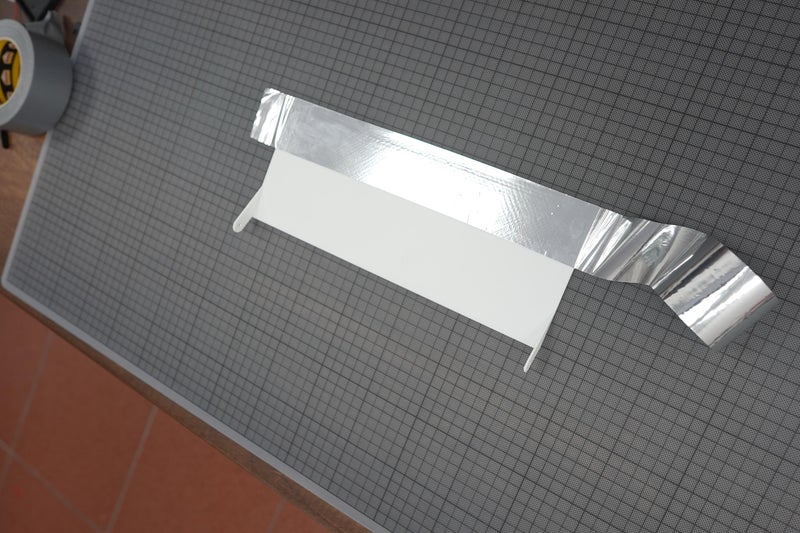




이 부착물은 하프의 성능을 크게 향상시키고 빔이 중단될 수 있는 높이를 높였습니다.
16단계: Arduinos에 코드 업로드
이 저장소에서 두 Arduinos에 대한 코드를 찾을 수 있습니다.
Arduino UNO(레이저와 모터를 제어함)의 코드를 업데이트해야 할 때마다
이 루틴을 따르는 것이 좋습니다.
- 12v 전원 공급 장치를 끕니다.
- 컴퓨터에서 Arduino Leonardo를 분리합니다.
- Arduino Uno에 Arduino 코드를 업로드합니다.
- 업로드 후 컴퓨터에서 Arduino Uno를 분리하십시오.
- 12v 전원 공급 장치를 켭니다.
- Arduino Leonardo를 컴퓨터에 다시 연결합니다.
Arduino Leonardo(초음파 센서를 제어하고 MIDI 음표를 생성함)의 코드를 업데이트해야 할 때마다 Arduino UNO가 모터와 레이저를 모두 처리하므로 하프가 작동하는 동안 중단 없이 새 코드를 업로드할 수 있습니다.
17단계: 하프로 음악 연주하기
Arduino Leonardo는 HID(Human Interface Device)로 작동할 수 있으므로 컴퓨터에 연결하고 좋아하는 DAW 소프트웨어를 실행하기만 하면 됩니다. 저는 GarageBand를 사용하고 있지만 Logic Pro, Ableton Live 및 기타 인기 있는 DAW에서도 작동합니다.
거기에서 좋아하는 소리를 선택하고 락을 시작할 수 있습니다!
또한 광선을 보이게 하고 상징적인 레이저 하프 효과를 만들기 위해 연기 기계가 필요합니다.
18단계: 개선을 위한 추가 단계
- Galvo 스캐너: 스테퍼 모터를 갈보 스캐너로 교체하면 스테퍼 모터의 속도와 정확성으로 인해 현재 설정이 7개의 현으로 제한되기 때문에 하프가 더 많은 현과 더 밝은 빔을 가질 수 있습니다. 갈보 스캐너를 사용하면 더 빠르고 정확한 빔 포지셔닝이 가능합니다.
- 센서 높이: 센서를 더 높은 위치에 장착하면 빔 중단을 감지하고 손의 높이를 더 잘 추적하는 능력이 더욱 향상됩니다. 이렇게 하면 더 정확한 음이 트리거되고 잠재적으로 사운드를 더 동적으로 제어할 수 있습니다. 장 미셸의 하프를 자세히 살펴보면 센서가 훨씬 더 높은 곳에 배치되어 있음을 알 수 있습니다.
이러한 업그레이드는 하프의 성능과 연주 가능성을 크게 향상시켜 반응성과 다재다능함을 높일 수 있습니다.
최종 작품의 결과 및 활용
이 프레임리스 레이저 하프는 컴퓨터와 연결하여 GarageBand, Logic Pro와 같은 DAW 소프트웨어에서 MIDI 입력으로 작동하며 실제 음악 연주가 가능합니다. 하프의 상징적인 효과를 위해 연기 머신을 추가하면 더욱 매혹적인 공연을 연출할 수 있습니다.
'아두이노' 카테고리의 다른 글
| 그루브 박스 - 아두이노 나노 드럼 머신 제작 이야기 (0) | 2025.04.07 |
|---|---|
| 컴팩트 데스크탑 MIDI 드럼 만들기 - DIY 프로젝트 (0) | 2025.03.20 |
| 휴대용 물병 충전 스테이션 (0) | 2025.03.17 |
| Arduino를 사용한 DIY RFID 도어록 시스템 만들기 (0) | 2025.03.10 |
| Arduino 기반 퍼즐 금고: Crack the Code Game (0) | 2025.02.05 |




{kind=link}
{kind=link}