안녕하세요, 여러분! 오늘은 메카넘 휠과 거리 센서를 이용해 정밀한 탐색을 가능하게 하는 메카넘 로봇, MKBUMBLE 프로젝트를 소개하려고 합니다. 이 로봇은 제한된 공간이나 복잡한 환경에서도 자유롭게 이동할 수 있는 능력을 갖추고 있습니다.

프로젝트 개요
MKBUMBLE 프로젝트는 메카넘 휠을 사용하여 전방향 이동성을 제공하는 다재다능한 로봇을 만드는 데 중점을 둡니다. 메카넘 휠의 독특한 디자인 덕분에 이 로봇은 앞, 뒤, 옆, 대각선 등 모든 방향으로 원활하게 이동할 수 있습니다. 거리 센서는 정확한 탐색을 위해 사용됩니다.
주요 기능
- 전방향 이동성: 메카넘 휠을 사용해 모든 방향으로 이동할 수 있습니다.
- 정밀 탐색: 거리 센서를 통해 장애물을 감지하고 회피합니다.
- 복잡한 환경에서의 작동: 좁은 공간이나 복잡한 환경에서도 원활하게 작동할 수 있습니다.
프로젝트 단계
- 하드웨어 구성:
- 메카넘 휠을 로봇 프레임에 장착합니다.
- 거리 센서를 로봇의 전면과 후면에 부착하여 장애물을 감지합니다.
- 모터와 배터리를 설치하여 로봇의 동력을 제공합니다.
- 소프트웨어 개발:
- Arduino 또는 Raspberry Pi를 사용하여 로봇의 제어 코드를 작성합니다.
- 모터 제어 알고리즘과 거리 센서 데이터 처리를 구현합니다.
- 테스트 및 최적화:
- 로봇의 이동성과 탐색 능력을 테스트합니다.
- 필요한 경우 소프트웨어와 하드웨어를 최적화하여 성능을 향상시킵니다.
개발 중 고려사항
- 에너지 효율성: 배터리 소모를 최소화하여 장시간 작동이 가능하도록 합니다.
- 내구성: 로봇의 구조를 강화하여 다양한 환경에서도 안정적으로 작동할 수 있게 합니다.
- 확장성: 향후 기능 추가나 개선을 고려하여 모듈식 디자인을 채택합니다.
공급
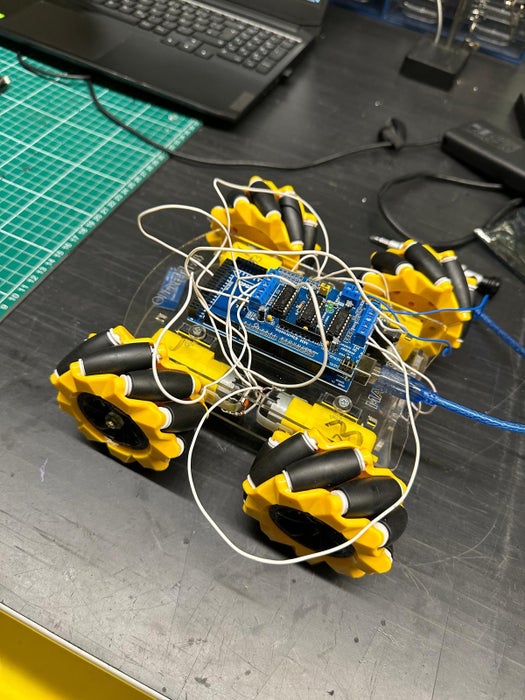
아두이노 우노, 아두이노 MEGA, HC-SR04, 블루투스 모듈, 메카넘 휠
1 단계 : 도면 및 디자인
첫 번째 단계
전기 노이즈를 줄이고 모터 성능을 향상시키기 위해 모터 단자에 커패시터를 납땜합니다.
모터를 메카넘 휠에 단단히 부착했습니다.
CAD 소프트웨어인 Fusion 360을 사용하여 본체를 설계하여 모터, 센서 및 전자 장치의 적절한 배치를 보장합니다.
거리 센서 및 기타 구성 요소를 위한 장착 구멍이 포함되어 있습니다.

2단계: 코딩 및 병합
두 번째 단계
프레임을 조립하고 모터를 부착하고 나사나 브래킷으로 고정합니다.
모터 드라이버(Adafruit Motor Shield)를 장착하고 모터에 연결했습니다.
모터 드라이버, 거리 센서 및 기타 구성 요소를 Arduino MEGA에 연결했습니다.
장애물 감지를 위한 적절한 위치에 센서를 장착했습니다. 센서 사양에 따라 센서를 Arduino에 배선했습니다.

3단계: 앱 디자인 및 테스트
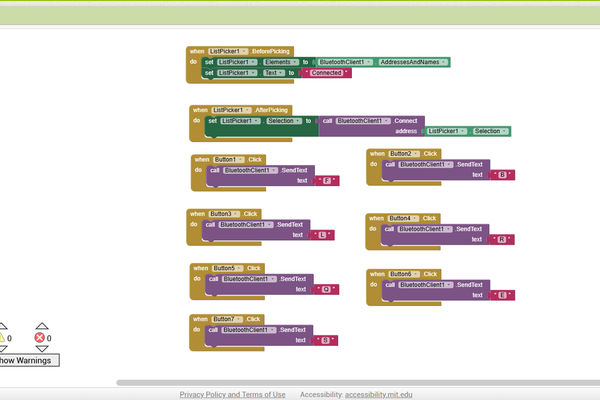
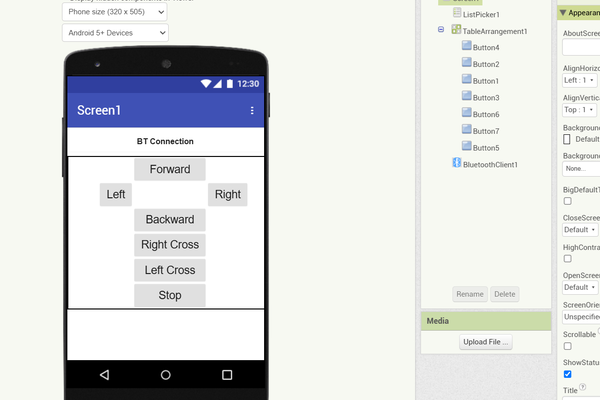
다음을 처리하도록 코드로 마이크로 컨트롤러를 프로그래밍했습니다.
- 6가지 이동 조건: 전진, 후진, 좌우, 대각선 이동 및 정지.
- 장애물을 감지하고 그에 따라 움직임을 제어하기 위한 거리 센서 기능.
로봇에서 코드를 테스트하고 필요에 따라 디버깅했습니다.
적절한 전원을 연결하여 모터 및 전자 장치에 대한 전압 및 전류 요구 사항이 충족되도록 합니다.
배터리 팩을 섀시에 고정했습니다.
결론
MKBUMBLE 프로젝트는 현재도 개발 중에 있으며, 앞으로 더 많은 기능과 개선이 이루어질 예정입니다. 이 로봇은 다재다능한 이동성을 제공하여 여러 환경에서 유용하게 활용될 수 있습니다. 프로젝트의 진행 상황과 업데이트를 계속해서 공유할 예정이니 많은 관심과 기대 부탁드립니다.
이 블로그 포스트가 여러분의 프로젝트에 도움이 되길 바랍니다. 다양한 가능성을 탐구하며 메카넘 로봇의 세계를 즐겨보세요! 🚀🤖
'메카넘 휠 로봇' 카테고리의 다른 글
| 메카넘 로봇 - MKBUMBLE: 전방향 이동 로봇 프로젝트 🚀 (2) | 2024.12.12 |
|---|---|
| 마이크로 컨트롤러 V의 555 타이머 - 모터 속도 컨트롤러 대결 (4) | 2024.09.30 |
| 메카넘 휠 설정 및 동작 (0) | 2022.12.17 |
| 메카넘 휠 로봇 - 블루투스 제어(mecanum wheel robot) (0) | 2022.12.12 |



