728x90
반응형
메카넘 휠 설정 및 동작
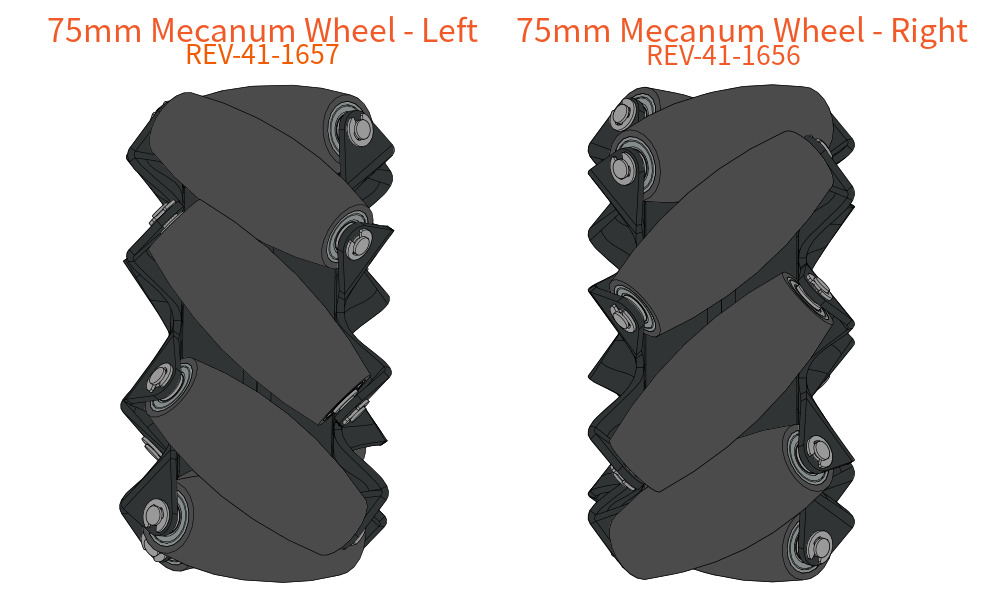
메카넘 휠은 구동계에 적절하게 설치되면 전방향 이동이 가능합니다. 각 메카넘 휠 세트( REV-45-1655 )에는 2개의 오른쪽(REV-41-1656) 및 2개의 왼쪽(REV-41-1657) 메카넘 휠이 함께 제공됩니다. 이것은 롤러의 앞쪽 가장자리 방향에 의해 결정됩니다. 롤러가 왼쪽을 가리키면 왼쪽 바퀴이고 오른쪽을 가리키면 오른쪽 바퀴입니다.
섀시의 각 면에는 왼쪽 바퀴와 오른쪽 바퀴가 하나씩 필요합니다. Mecanum Chassis도 작동을 위해 4개의 모터가 필요합니다.
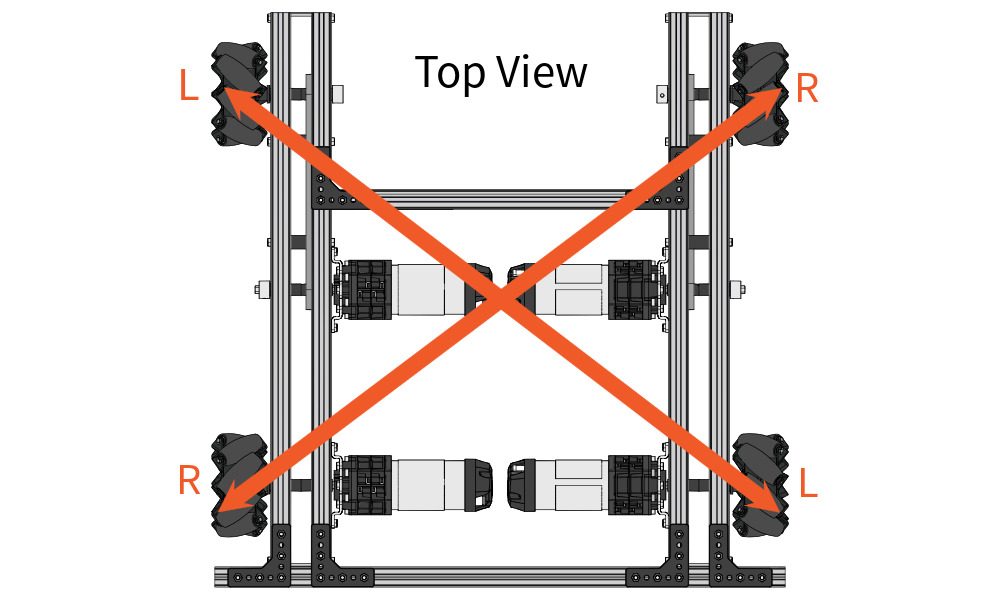
메카넘 휠이 제대로 구성되었는지 확인하려면 구동계를 위에서 아래로 살펴보십시오. 롤러의 각도에서 생성된 다음 대각선은 위와 같이 "X"를 형성해야 합니다.
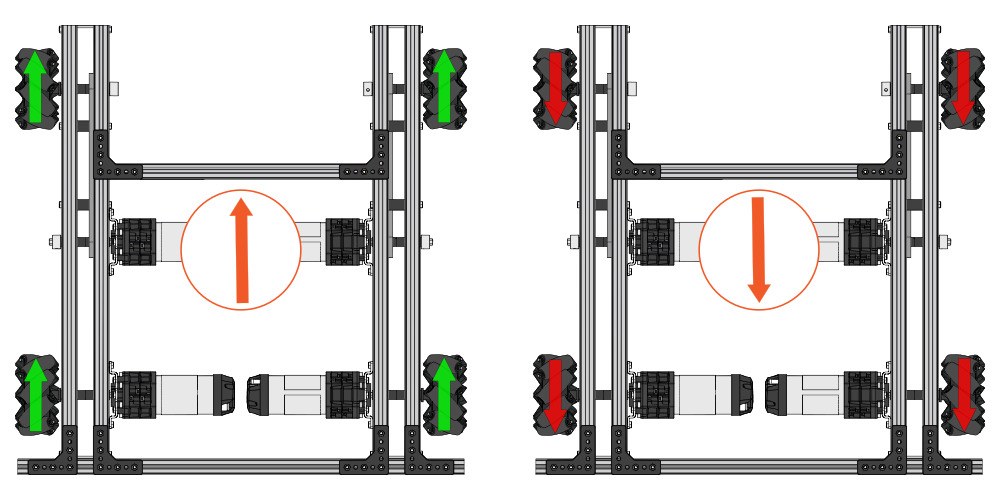
메카넘 휠 드라이브트레인 동작
4개의 바퀴를 모두 같은 방향으로 같은 속도로 달리면 세로 힘 벡터가 합산되지만 가로 벡터는 서로 상쇄되기 때문에 전진/후진 이동이 발생합니다.
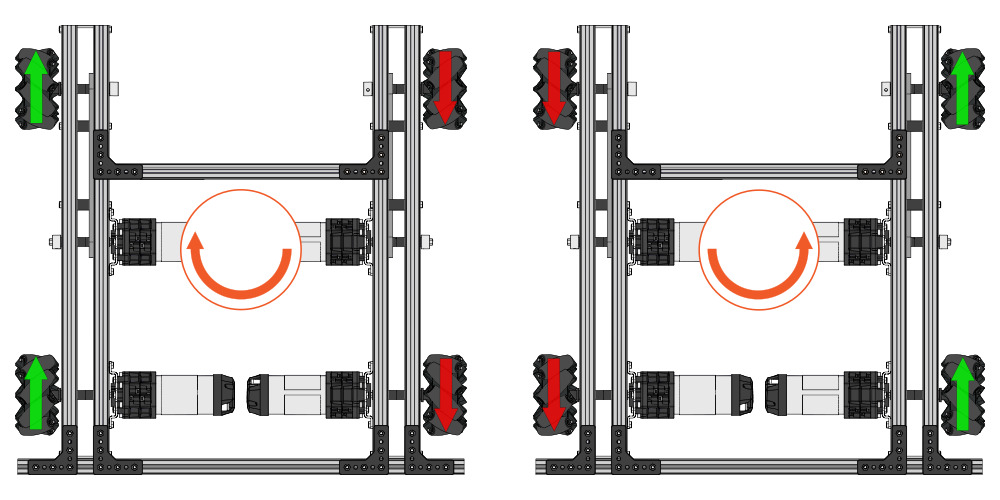
드라이브 트레인의 한쪽에 있는 두 바퀴가 한 방향으로 움직이고 다른 쪽이 반대 방향으로 움직이면 드라이브 트레인이 정지 회전합니다. 횡방향 벡터는 상쇄되지만 종방향 벡터는 결합되어 아래와 같이 구동계의 중심 수직축을 중심으로 회전을 생성합니다.
오른쪽 메카넘 바퀴가 한 방향으로 달리고 왼쪽 메카넘 바퀴가 반대 방향으로 달리면 횡방향 벡터가 합산되지만 종방향 벡터가 상쇄되므로 기총소사 움직임이 허용됩니다.
각 휠 유형에 다양한 모터 출력을 통해 위의 개념을 함께 사용하면 드라이브 트레인이 서로 다른 각도의 벡터로 움직일 수 있습니다.
728x90
반응형
'메카넘 휠 로봇' 카테고리의 다른 글
| Arduino 장애물 회피 자동차 제작하기 (Mecanum Wheel 사용) (0) | 2025.02.04 |
|---|---|
| 메카넘 로봇 - MKBUMBLE: 전방향 이동 로봇 프로젝트 🚀 (2) | 2024.12.12 |
| 메카넘 로봇 - MKBUMBLE: 다재다능한 전방향 이동 로봇 프로젝트 🚀 (1) | 2024.12.12 |
| 마이크로 컨트롤러 V의 555 타이머 - 모터 속도 컨트롤러 대결 (4) | 2024.09.30 |
| 메카넘 휠 로봇 - 블루투스 제어(mecanum wheel robot) (1) | 2022.12.12 |



