라디오 모듈을 사용하여 집에서 아두이노 제스처 컨트롤 로봇 만들기
이 프로젝트에서는 라디오 모듈을 사용하여 아주 쉬운 방법으로 집에서 아두이노 제스처 컨트롤 로봇을 만드는 방법을 보여드리겠습니다.
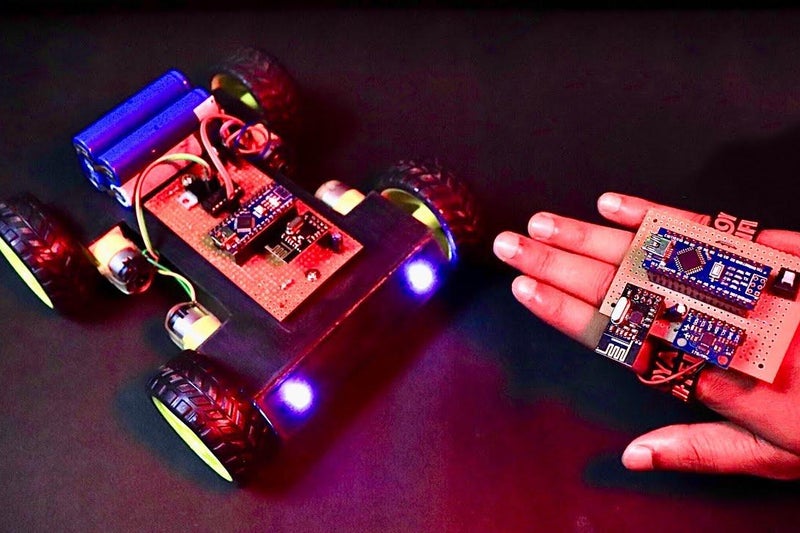
먼저, 이 프로젝트의 특징을 알아보겠습니다! 일반적인 라디오 조종 자동차와 같이 이 로봇 자동차는 원격 제어를 위한 리모컨이나 제어 버튼이 없습니다!
말하자면, 이동을 위한 위, 아래, 오른쪽, 왼쪽 조작을 위한 리모컨이나 제어 버튼이 없습니다.
이 프로젝트는 대신 제스처 기능을 가지고 있으며, 손의 제스처로 차량을 제어할 수 있습니다.
손의 제스처로 무언가를 제어하는 것은 얼마나 멋진 일일까요? 특히 집에서 직접 만들 수 있는 프로젝트로 제어하는 것이 더욱 흥미로울 것입니다.
말이 길어졌으니, 이 프로젝트를 어떻게 구축할 수 있는지 알아보겠습니다. 항상처럼 이 프로젝트를 구축하는 완전한 지침, 회로도, 그리고 코드를 포함하여 설명하겠습니다.


이 프로젝트에서는 매우 쉬운 방법으로 무선 모듈을 사용하여 집에서 Arduino 제스처 제어 로봇을 만드는 방법을 보여 드리겠습니다.
먼저 이 프로젝트의 기능을 살펴보겠습니다! 리모컨으로 달리는 일반적인 무선 조종 자동차와 마찬가지로 이 로봇 자동차는 리모컨이 없습니다!
위, 아래, 오른쪽, 왼쪽으로 이동할 수 있는 리모컨이나 제어 버튼이 없다는 뜻입니다.
대신 이 프로젝트에는 제스처의 고급 기능이 있으며 손의 제스처로 자동차를 제어하게 됩니다.
손의 제스처로 무언가를 제어하고 집에서 만들 수 있는 프로젝트로 제어하는 것이 얼마나 멋진가요?
이 말과 함께 항상 그렇듯이 회로도 및 코드와 함께 이 프로젝트를 구축하는 방법에 대한 전체 지침도 포함했습니다.
공급




- 골판지 조각
- BO 모터 및 휠
- 아두이노 나노
- 자이로 센서 또는 MPU6050
- 재질 보기 NRF 24L01 NRF 24L01
- 팁 32c 트랜지스터
- 9v 배터리 및 홀더
- L293D 서보 모터 드라이버
- 핫 글루
- 빈 PCB
- 손목용 밴드
- 양면 테이프
- LED 조명(옵션)
- 납땜
1 단계 :






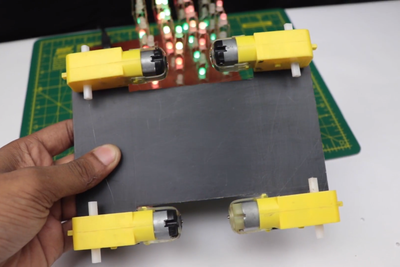




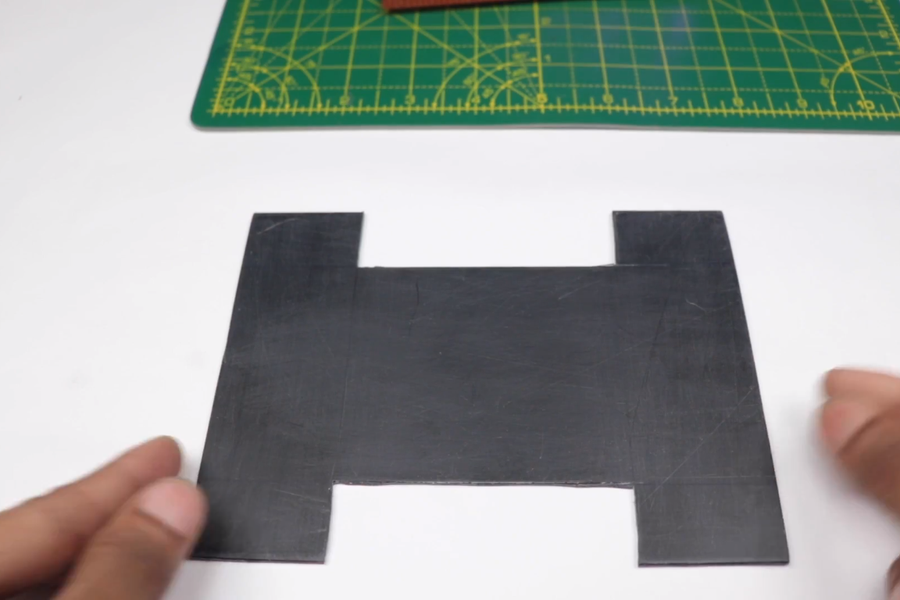
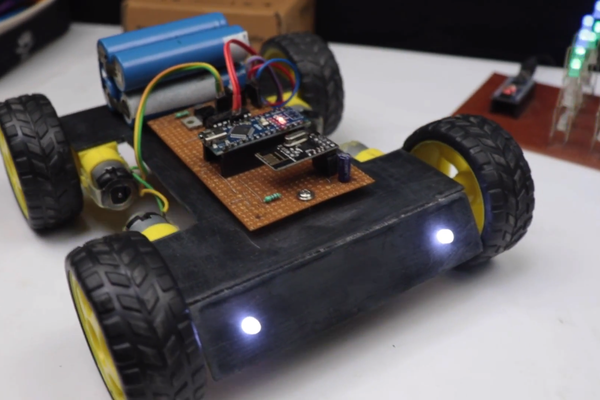
네 개의 바퀴와 BO 모터를 지지하기 위해 판지 조각을 사용할 것입니다.
위의 이미지에서 볼 수 있듯이 골판지의 모양을 자를 수 있으며, 바퀴의 크기가 크면 약간의 수정이 필요할 수 있습니다.
그 모양이 생기면 이 판지에 BO 모터 조립을 시작할 수 있습니다.
뜨거운 접착제 한 방울을 추가하고 BO 모터를 놓고 뜨거운 접착제가 너무 뜨겁지 않은지 확인하지 않으면 모터 케이스의 플라스틱이 녹을 수 있습니다.
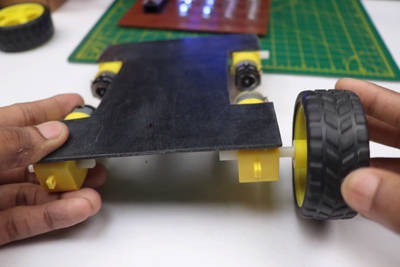
다른 쪽에도 동일한 단계를 반복하고 모든 BO 모터를 준비한 후 바퀴를 부착할 수 있습니다.
이제 사전 납땜 된 와이어가없는 경우 와이어를 BO 모터에 납땜 할 수 있습니다.
와이어의 내 끝은 이 프로젝트에 유용하다고 생각되는 소켓에서 가져온 것으로, 수형 핀에 쉽게 연결할 수 있는 연결 와이어입니다.
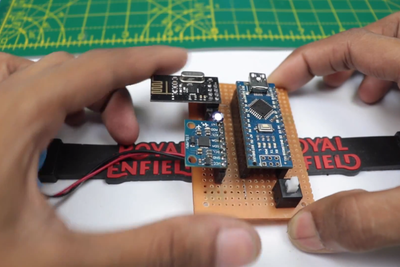
2단계: 송신기 회로




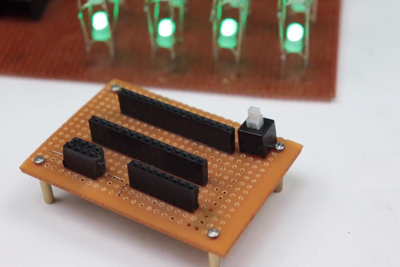


빈 PCB를 사용하여 구성 요소를 고정하고 회로를 만들 것입니다.
Arduino Nano 보드를 고정하기 위해 슬롯을 납땜하는 것으로 시작하겠습니다., 납땜에 대한 실무 경험이 있는 경우 쉬운 과정이며, 그렇지 않은 경우 전문가의 감독을 받아야 할 수도 있습니다.
다른 방법은 브레드 보드에 회로를 만들 수 있지만 프로젝트를 너무 복잡하게 만드는 것입니다.
Arduino 슬롯 뒤에 MPU6050 NRFL201 모듈을 고정할 슬롯을 만듭니다.
프로세스가 끝나면 준비된 송신기 회로가 생기고 작업에 필수적인 코드만 누락됩니다.
3단계: 수신기 회로
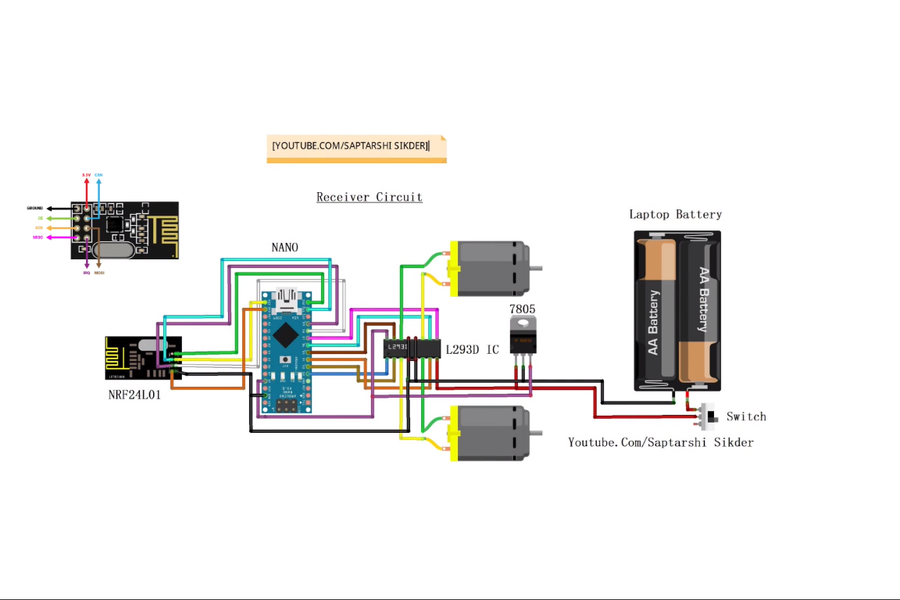







여기에서도 프로세스는 동일하지만 여기에서는 훨씬 더 큰 빈 PCB를 선택할 수 있는 자유가 있으며 어쨌든 이것은 자동차에 설치되므로 공간 사용 문제가 많이 신경 쓰이지 않습니다.
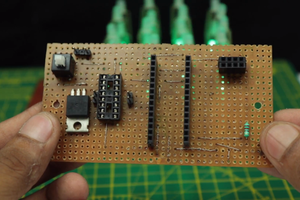
구성 요소가 나중에 추가될 빈 PCB에 슬롯을 납땜하여 시작한 다음 트랜지스터와 모터 드라이브를 PCB에 직접 추가합니다.
회로를 따라 연결하여 재작업 문제를 놓치면 시간이 낭비됩니다.
이 보드에 전원을 공급하기 위해 오래된 노트북에서 재활용한 충전식 배터리를 사용합니다.
나는 전체 회로에 오랫동안 전원을 공급하기 위해 2 쌍으로 함께 납땜 된 4 세트를 사용했습니다.
배터리 끝은 연결 핀에 맞는 슬롯으로 납땜되었습니다.
4단계: 회로 마무리


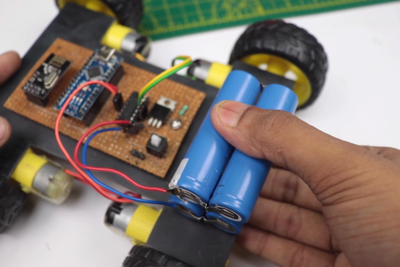
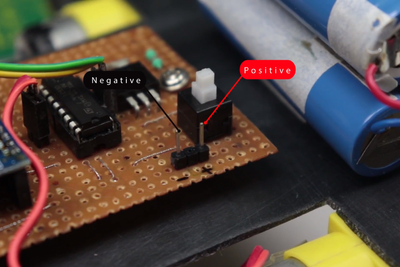


이제 송신기와 수신기의 회로가 모두 준비되었으므로 전원 소스를 추가하여 회로를 완성합니다.
앞서 준비한 배터리 팩이 자동차 프레임에 추가되고 양면 접착제를 사용하여 배터리 팩을 고정합니다.
그런 다음 배터리 단자를 회로 기판 핀에 연결합니다.
이 과정이 끝나면 자동차가 준비되고 지금 보류 중인 것은 이 로봇의 코드입니다.
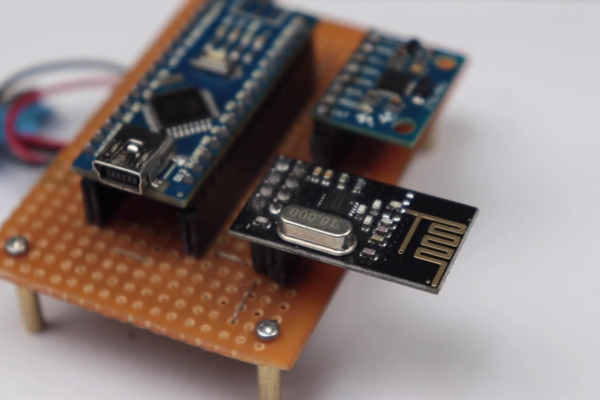
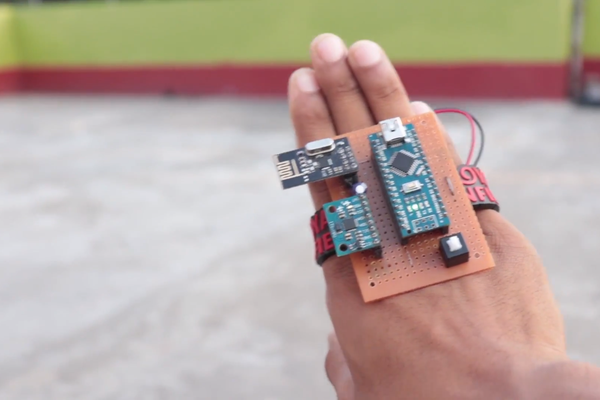
5단계: 송신기 프로그래밍 및 설정

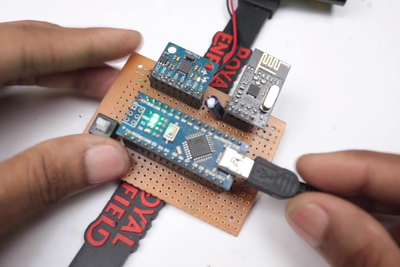
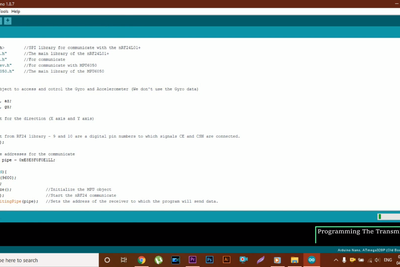
이것은 우리 프로젝트의 제어판이며 버튼은 내가 정의할 수 있는 집적 회로로 만들어졌습니다.
여기서 자이로 센서 내부의 작은 모션 센서는 MPU6050라고도 하며 전체 차량 움직임을 제어합니다.
이 동작은 Arduino에서 읽고 최종적으로 수신기에 전파로 보낼 수 있도록 특정 명령으로 변환되어야 합니다.
이 작업은 Arduino 코드에 의해 수행되며 아래 코드를 복사하여 Arduino IDE에 붙여넣고 코드가 업로드되면 수신기를 사용할 준비가 되면 이제 USB 케이블을 분리하고 9v 배터리를 연결합니다.
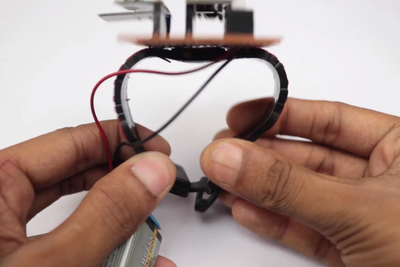
이 송신기를 모든 손목에 맞도록 조정 가능한 손목 밴드에 설치했습니다.
6단계: 수신기 프로그래밍 및 설정

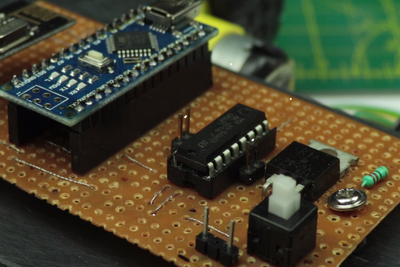

프로젝트에서 자동차는 수신기에 의해 제어되며 수신기는 노예 Arduino에 불과합니다.
우리는 프로젝트에서 마스터 슬레이브 전자 장치의 개념을 사용하고 있으며, 이 Arduino 코드는 송신기 모듈의 신호를 모터 드라이버를 통해 DC 모터를 실행할 의미 있는 신호로 변환합니다.
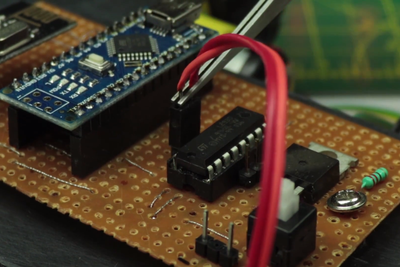
이 단계의 2번째 이미지에서 L293D 모터 드라이버를 볼 수 있습니다.
DC 모터/BO 모터의 단자를 제공된 슬롯에 연결할 수 있습니다.
그런 다음 프로그래밍 케이블을 컴퓨터와 Arduino에 연결합니다.
수신기 코드를 복사하여 IDE에 붙여넣고 업로드 버튼을 누르면 잠시 후 수신 부분이 준비되고 배터리 공급 장치를 회로에 연결하기만 하면 됩니다.
7 단계 : 사용 방법




이 제스처 제어 로봇을 사용하는 것은 매우 쉽고 배터리만 자동차와 리모컨(송신기)에 모두 연결합니다.
당신에게 맞는 송신기는 리모컨으로 작동하지만 버튼은 없습니다.
방향을 향해 손을 움직이면 방향 변화가 자이로스코프 센서에 의해 감지되고 움직임에 따라 Tx 또는 송신기의 Arduino 보드가 로봇 자동차에 있는 수신기 보드로 신호를 보내므로 로봇이 손 제스처에 따라 움직입니다.
'아두이노' 카테고리의 다른 글
| Arduino LED 깜박임 -Arduino LED Blinking (2) | 2023.11.20 |
|---|---|
| MAX7219 LED 매트릭스 디스플레이(Arduino 튜토리얼 포함) (1) | 2023.11.20 |
| 2x16 LCD 온도 및 습도 센서 (1) | 2023.11.17 |
| Arduino PIR 모션 센서 튜토리얼 (1) | 2023.11.14 |
| 아두이노 기반 게이트 시스템 만들기 (How to Make Arduino Gate System) (1) | 2023.11.13 |



