728x90
반응형
"아두이노 기반 게이트 시스템 만들기"
내용:
1. 소개
아두이노 나노, 초음파 센서, 마이크로 서보 및 점퍼 와이어를 사용하여 간단한 아두이노 기반 게이트 시스템을 만드는 방법 소개
이 프로젝트는 센서 기반 자동화의 기본적인 응용을 보여주기 위한 것으로, 누군가가 접근하면 게이트가 자동으로 열리고 이동하면 게이트가 닫히는 기능을 구현
2. 프로젝트 구성 요소
아두이노 나노: 시스템의 뇌로 데이터 처리 및 마이크로 서보 제어 담당
초음파 센서 (HC-SR04): 게이트 근처에 있는 물체 또는 사람의 존재를 감지하는 역할
마이크로 서보 모터: 게이트의 움직임을 제어하는 역할
점퍼 와이어: 구성 요소 간 전기 연결을 위해 사용
미니 브레드보드: 점퍼 연결을 위한 브레드보드
판지 조각: 구성 요소를 부착할 간단한 기판 제작용
3. 초음파 센서의 작동 원리
초음파 센서는 주변 물체의 거리를 감지하기 위해 소리 파동을 사용
센서는 고주파 소리 파동을 발생시키고 주변 물체에 반사된 파동을 다시 받아옴
파동의 이동 시간을 측정하여 센서와 물체 사이의 거리를 계산
4. 마이크로 서보의 작동 원리
마이크로 서보는 로봇 공학 및 기타 프로젝트에서 각도 위치의 정밀한 제어가 필요한 경우사용되는 작은 장치
기어박스와 제어 회로가 통합된 작은 모터로 구성
케이싱 내부의 서보 모터는 전기 신호에 따라 특정 각도로 회전
전원 (Vcc), 그라운드 (GND) 및 신호 (제어)의 세 가닥으로 구성된 와이어를 아두이노의 PWM (펄스 폭 변조) 핀에 연결
아두이노는 PWM 신호를 서보에 보내며, 펄스 폭에 따라 서보 모터의 원하는 위치를 제어
펄스 폭을 조정하여 서보를 범위 내에서 다양한 각도로 회전 가능

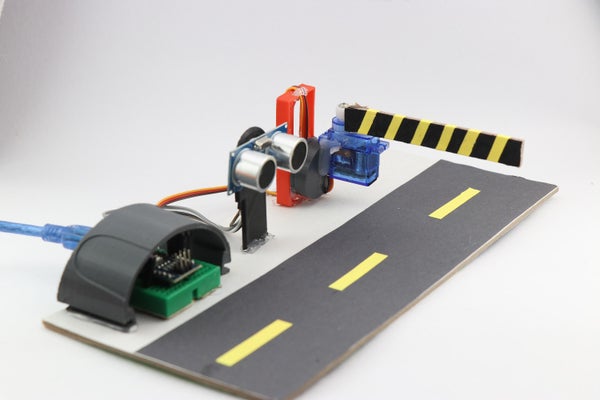
이 프로젝트에서는 Arduino Nano, 초음파 센서, 마이크로 서보 및 일부 점퍼 와이어를 사용하여 간단한 Arduino 기반 게이트 시스템을 만드는 방법을 보여 드리겠습니다.
이 프로젝트가 무엇인지 간단히 정의하겠습니다
이 프로젝트는 누군가 접근하면 게이트가 자동으로 열리고 사람이 멀어지면 닫히는 센서 기반 자동화의 기본 응용 프로그램을 시연하는 것을 목표로 합니다.
이 프로젝트를 쉽게 빌드하여 모든 사람이 사용할 수 있도록 회로도를 설명하고, 코드 작업을 설명하고, 판지에 프로젝트를 빌드하는 단계별 지침을 제공했습니다.
공급




Arduino 게이트 시스템을 구축하려면 다음 구성 요소가 필요합니다.
각 구성 요소의 역할에 대한 간략한 정보를 제공하겠습니다
아두이노 나노
데이터 처리 및 마이크로 서보 제어를 담당하는 시스템의 두뇌입니다.
초음파 센서(HC-SR04)
게이트 근처에 물체나 사람의 존재를 감지하는 데 사용됩니다.
마이크로 서보 모터
게이트의 움직임을 제어하는 역할을 합니다.
점퍼 와이어
구성 요소 간의 전기 연결을 설정합니다.
미니 브레드보드
점퍼를 연결하려면
골판지 조각
구성 요소를 장착하기 위한 간단한 베이스를 만듭니다.
초음파 센서는 어떻게 작동합니까?
초음파 센서는 음파를 사용하여 주변 물체의 거리를 감지합니다.
센서는 고주파 음파(일반적으로 사람의 청각 범위 이상)를 방출한 다음 주변 물체에서 반사되어 센서로 돌아갑니다.
음파가 물체로 이동하고 돌아오는 데 걸리는 시간을 측정하여 센서는 자신과 물체 사이의 거리를 계산할 수 있습니다.
이 센서는 송신기와 수신기의 두 가지 주요 구성 요소로 구성됩니다. 송신기는 초음파 음파를 생성하고 수신기는 반향 신호를 포착합니다.
음파가 되돌아오는 데 걸리는 시간은 센서에서 물체까지의 거리에 비례합니다.
마이크로 서보는 어떻게 작동합니까?
마이크로 서보는 각도 위치의 정밀한 제어가 필요한 로봇 공학 및 기타 프로젝트에서 일반적으로 사용되는 소형 장치입니다.
기본적으로 기어박스와 제어 회로가 통합된 소형 모터입니다.
케이싱 내부의 서보 모터는 수신하는 전기 신호에 따라 특정 각도로 회전합니다. 전원(Vcc), 접지(GND) 및 신호(제어)의 세 가지 와이어로 구성됩니다.
서보의 제어 와이어는 Arduino의 PWM(펄스 폭 변조) 핀에 연결됩니다. Arduino는 일련의 PWM 신호를 서보로 보내며 펄스 폭은 서보 모터의 원하는 위치를 결정합니다.
펄스 폭을 조정하면 서보가 범위 내에서 일반적으로 0도에서 180도 사이의 다른 각도로 회전하도록 제어할 수 있습니다.
1단계: 회로도





회로도에 대한 간단한 설명을 드리겠습니다., 일단 다이어그램을 보고 점퍼를 잡고 회로 구축을 시작하십시오!
Arduino 게이트 시스템의 회로도는 간단합니다. 다음 연결을 따르십시오.
초음파 센서의 VCC 핀을 아두이노 나노의 5V 핀에 연결합니다.
초음파 센서의 GND 핀을 Arduino Nano의 GND 핀에 연결합니다.
초음파 센서의 삼각 핀을 Arduino Nano의 디지털 핀 D2에 연결합니다.
초음파 센서의 에코 핀을 Arduino Nano의 디지털 핀 D3에 연결합니다.
마이크로 서보의 신호(제어) 핀을 Arduino Nano의 디지털 핀 D9에 연결합니다.
마이크로 서보의 VCC 및 GND 핀을 Arduino Nano의 5V 및 GND 핀에 각각 연결합니다.
2단계: 아두이노 코드


3 이미지 더
원하는 경우 변경할 수 있도록 코드를 설명하겠습니다.
다음은 코드 전체에서 사용되는 변수입니다. 각 변수의 의미는 다음과 같습니다.
servo: 서보 모터를 제어하는 데 사용되는 Servo 객체입니다.
trigPin 및 echoPin: 각각 에코 신호를 트리거하고 수신하기 위해 초음파 센서에 연결된 핀입니다.
서보핀: 서보 모터의 신호선이 연결되는 핀입니다.
기간: 초음파 펄스가 앞뒤로 이동하는 데 걸리는 시간입니다.
dist 크랙: 초음파 센서에서 물체(손)까지의 계산된 거리입니다.
average: 여러 측정값에서 얻은 평균 거리를 저장하는 변수입니다.
평균[ ]: 평균을 계산하기 위해 세 개의 거리 측정값을 저장하는 배열입니다.
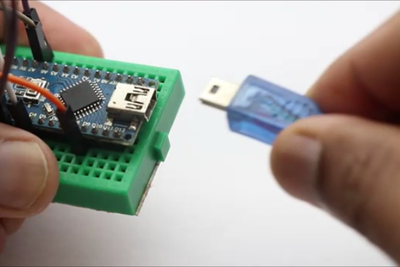
Nano에 코드를 업로드하는 방법은 무엇입니까?
USB 케이블을 사용하여 Arduino Nano를 컴퓨터에 연결합니다.
컴퓨터에서 Arduino IDE를 열고 Arduino IDE에서 상단 메뉴의 "도구"로 이동하여 Board-> Arduino Nano, Processor-> ATmega328P(이전 부트로더), 포트 옵션을 선택합니다. Arduino Nano에 해당하는 COM 포트를 선택합니다.
어떤 포트를 선택해야 할지 잘 모르겠다면 Nano를 연결하기 전과 후의 포트를 확인하고 나타나는 새 포트가 Nano여야 합니다.
- * 질문에 제공한 전체 코드를 복사하고 코드를 새 스케치에 붙여넣습니다.
- * Arduino IDE에서 "업로드" 버튼(오른쪽 화살표 아이콘)을 클릭합니다. 그러면 코드가 컴파일되어 Arduino Nano에 업로드됩니다.
- * Arduino IDE에 업로드 진행률이 표시되며 완료되면 창 하단에 "업로드 완료"가 표시되어야 합니다.
- * 이제 코드가 Arduino Nano에 업로드되었으며 게이트 시스템이 작동할 준비가 되었습니다.
.
Toll_gate_arduino_and_uss.ino
0.00MB
3단계: 조립









회로가 준비되고 작동하므로 이러한 모든 구성 요소를 판지에 설정하기만 하면 됩니다.
먼저 브레드보드와 나노를 판지에 놓고 소량의 뜨거운 접착제를 추가하여 고정합니다.
나는 호처럼 보이는 3D 프린팅의 것을 사용했지만 모든 전선을 제자리에 유지하고 전선이 분리되는 것을 방지합니다.
서보를 설정하기 위해 운 좋게도 내 목적에 부합하는 재활용 부품을 사용했으며 이 목적으로도 판지 스트립을 사용할 수 있습니다.
이제 동일한 지침에 따라 초음파 센서를 제자리에 유지하십시오.
위의 이미지에서 볼 수 있듯이 모든 구성 요소를 제자리에 붙입니다.
4단계: 마무리

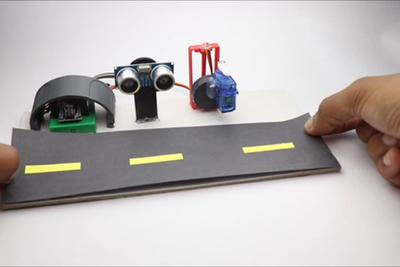



현재 보류 중인 마지막 두 가지는 도로와 장벽입니다
나는 직사각형 형태로 자른 검은 색 종이의 도움으로 길을 만들었습니다 (골판지의 공간 가용성으로 인해)
실제 도로와 비슷한 작은 줄무늬 종이를 몇 장 붙입니다.
종이 접착제를 사용하여 이 설정을 판지에 붙입니다
이제 게이트의 경우 주의 게이트처럼 보이도록 색상이 지정된 판지 스트립을 사용할 수 있습니다
뜨거운 접착제를 사용하여 이 스트립을 마이크로 서보의 뿔에 부착합니다.
5 단계 : 작동 원리



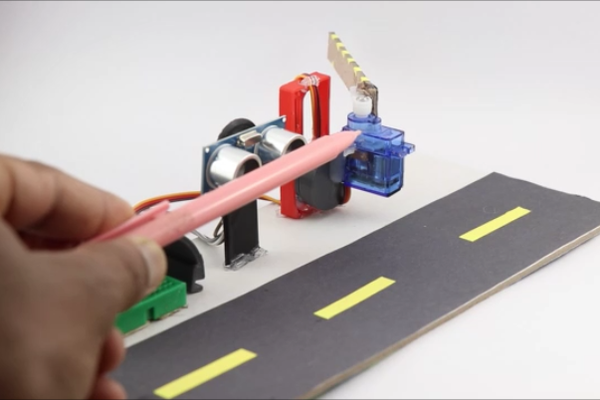

앞서 논의했듯이 이것은 간단한 방법으로 작동합니다
초음파 센서에 의해 장애물이 감지되면 마이크로 서보가 활성화되어 일정 시간 동안 게이트가 열립니다.
주어진 시간이 지나면 문이 자동으로 닫혀 다른 사람의 출입을 제거합니다.
왜 이 아두이노 게이트 시스템인가?
이 Arduino 게이트 시스템은 게이트를 열고 닫는 프로세스를 효과적으로 자동화하여 수동 개입이 필요하지 않습니다.
또한 입장하기 위해 게이트와 물리적으로 상호 작용할 필요가 없기 때문에 사용자에게 보다 편리한 경험을 제공합니다.
전반적으로 Arduino 게이트 시스템은 센서, 마이크로 컨트롤러 및 액추에이터를 결합하여 스마트하고 효율적인 엔트리 액세스 솔루션을 만드는 환상적인 기술 응용 프로그램을 나타냅니다.
728x90
반응형
'아두이노' 카테고리의 다른 글
| 2x16 LCD 온도 및 습도 센서 (1) | 2023.11.17 |
|---|---|
| Arduino PIR 모션 센서 튜토리얼 (1) | 2023.11.14 |
| Tinkercad 회로와 Arduino를 사용하는 가위바위보 게임 (0) | 2023.10.28 |
| 거품 속도 제어 기능을 가진 거품 송풍기 기계를 만드는 방법 (1) | 2023.10.28 |
| Arduino와 PCB를 가진 단 하나 버튼 게임기(Single-Button Game Console With Arduino and PCB) (0) | 2023.10.28 |



