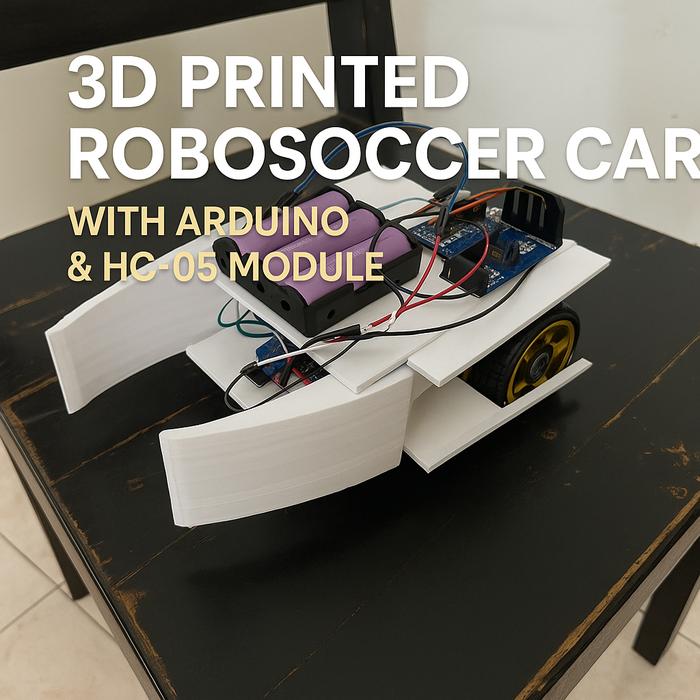
⚽ 시작은 작은 의문 하나였습니다
때로는 가장 단순한 질문이 가장 위대한 여정을 이끕니다. 온라인에서 우연히 본 RoboSoccer 경기—수십 대의 로봇이 공을 향해 돌진하고, 정교하게 방향을 바꾸고, 골대를 향해 정확히 슈팅하는 모습은 놀라움 그 자체였습니다. 그 순간 제 마음속 깊은 곳에서 불꽃이 일었습니다.
"나도 만들 수 있을까?"
전문 장비도, 고급 학위도 없었죠. 가진 건 열정과 유튜브 튜토리얼, 몇 개의 전자 부품, 그리고 밤을 지새우게 만드는 창작욕뿐이었습니다.


🛠️ 첫 번째 시도, 그리고 깨달음
처음 만들어 본 프로토타입은 작동은 했지만 어딘가 부족했습니다. 단순히 움직이는 것보다, 세련되고 안정적이며 기능적인 작품을 만들고 싶었습니다. 그래서 저는 새로운 목표를 세웠습니다:
- 더 작고 단단하며 빠른 디자인
- 일반적인 취미 프로젝트가 아닌 전문적인 느낌의 제품으로 보이게 하기
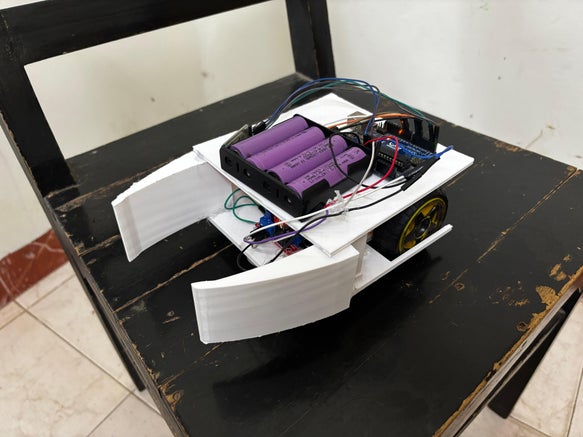
🧩 핵심 부품 리스트
| Arduino Uno | 로봇의 뇌 |
| HC-05 Bluetooth 모듈 | 스마트폰과 무선 통신 |
| L298N 모터 드라이버 | 모터 속도 및 방향 제어 |
| DC 기어드 모터 | 바퀴 움직임 |
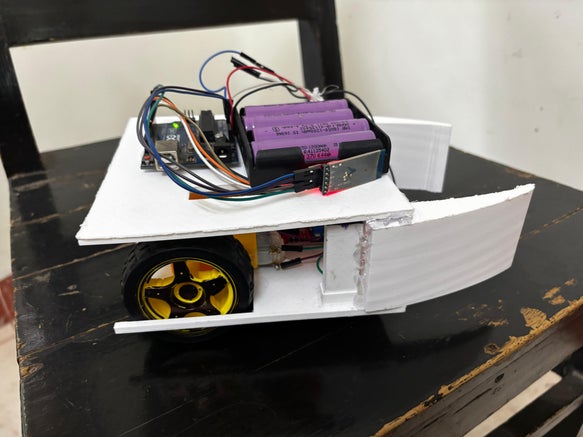
| 3D 프린팅 구조체 | 외형 및 무게 최적화 |
| 리튬 이온 배터리 | 전력 공급 |
| 바퀴 & 볼 캐스터 | 전방향 이동 및 안정성 |
🎨 외형의 완성, JUSTWAY 덕분입니다
전자제품이 아무리 정밀하고 기능이 훌륭해도, 구조물이 어설프다면 사람들의 인식을 바꾸기 어렵습니다. JUSTWAY는 이 부분을 완전히 바꿔 놓았습니다. 산업 수준의 마감, 실시간 3D 모델 미리보기, 즉시 견적 시스템, 다양한 소재 선택 — 덕분에 제 로봇은 마치 완제품처럼 보이게 되었습니다.
💡 참고: [JUSTWAY 여름 캐시백 이벤트 – 2025년 6월 1일 ~ 8월 31일]
📱 Bluetooth 제어 방식
Arduino Car 앱을 통해 블루투스로 제어하며, 다음과 같은 명령어 구성을 적용했습니다:
- L: 전진
- R: 후진
- B: 좌회전
- F: 우회전
- S: 정지
- X: 정밀 회전 모드 ON
- Y: 정밀 회전 모드 OFF
X 모드에서는 바퀴가 서로 반대 방향으로 회전하여 제자리 360도 회전이 가능하며, 실제 경기에서도 민첩한 움직임을 보여줍니다.
🔌 회로 구성 요약
- HC-05 Bluetooth 모듈
- VCC → Arduino 5V
- GND → Arduino GND
- Tx → D0
- Rx → D1
- L298N 모터 드라이버
- IN1 → D5
- IN2 → D6
- IN3 → D9
- IN4 → D10

전원은 배터리로 공급하며, 깔끔하게 납땜하고 3D 프레임 안에 배선이 숨겨지도록 구성했습니다.
char t;
bool preciseTurning = false;
// Motor pins
int in1 = 5; // Left motor forward
int in2 = 6; // Left motor reverse
int in3 = 9; // Right motor forward
int in4 = 10; // Right motor reverse
void setup() {
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
Serial.begin(9600); // HC-05 on pins 0 and 1
}
void loop() {
if (Serial.available()) {
t = Serial.read();
Serial.println(t); // Optional debug
// Mode toggle
if (t == 'X') {
preciseTurning = true;
}
else if (t == 'Y') {
preciseTurning = false;
}
// ---- Main Movement ----
if (t == 'L') { // Forward
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
else if (t == 'R') { // Backward
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
}
else if (t == 'S') { // Stop
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
else if (t == 'B') { // Turn Left
if (preciseTurning) {
// In-place rotate left
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
} else {
// Only left motor ON
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
}
else if (t == 'F') { // Turn Right
if (preciseTurning) {
// In-place rotate right
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
} else {
// Only right motor ON
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
}
}
}🧠 그리고 가장 중요한 것 — 경험
이 프로젝트는 단순한 코딩이나 조립이 아니었습니다.
- 처음 배우는 분야에서 맨땅에 헤딩
- 수많은 실패와 재설계
- 유튜브로는 해결되지 않는 현장 문제 해결력 키우기
- 그리고 직접 만든 로봇이 골을 넣는 순간의 감격
이제 저는 단순한 하드웨어가 아니라, 스스로 무엇이든 만들 수 있다는 확신을 얻었습니다.
✨ 마무리
누군가는 이걸 '작은 로봇'이라 부르겠지만, 저에게는 무한한 가능성과 창작에 대한 사랑을 증명하는 결과물입니다.
만약 지금 "나도 만들 수 있을까?"라는 마음이 든다면, 정답은 아주 간단합니다:
'아두이노' 카테고리의 다른 글
| 🎮 아두이노로 만드는 레트로 스네이크 게임 (+사운드) 제작기 (0) | 2025.07.08 |
|---|---|
| 📟 아두이노 메가2560 시계 & 센서 통합 프로젝트 (LCD, EEPROM, 초음파, SY-LD213) (0) | 2025.06.21 |
| 🍃 Leafi: 나뭇잎처럼 생긴 똑똑한 공기질 센서 만들기 (0) | 2025.06.13 |
| Arduino를 이용한 자동 페이퍼 홀 펀치 장치 만들기 (0) | 2025.06.10 |
| LOFI 블록을 이용한 아두이노 로봇 제작 및 제어 (3) | 2025.06.09 |



