728x90
반응형
부활절을 맞아 여러분만의 로봇 팔로 달걀을 꾸미며 독창성을 발휘해 보는 건 어떨까요? 이 튜토리얼에서는 Arduino와 Inkscape를 사용하여 달걀을 원하는 대로 디자인할 수 있는 로봇 팔 Eduino를 만드는 과정을 안내합니다. 복잡한 과정을 간단하게 압축했으니 초보자도 따라 하기 쉬울 거예요!


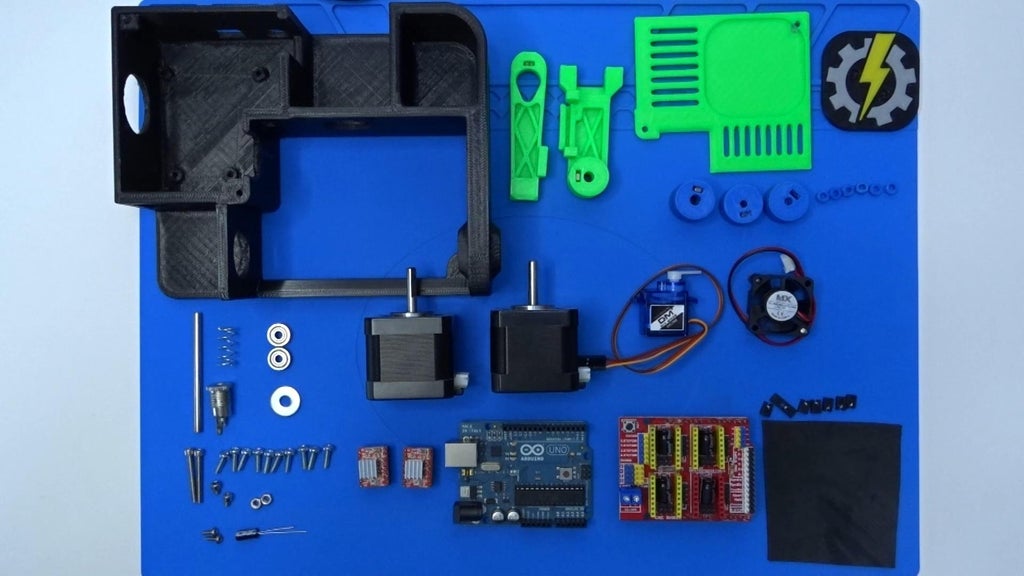
필요한 구성 요소:
BOM 및 구매 링크:
- Nema 17 모터 구매 링크
- CNC 쉴드 V3 + A4988 드라이버 구매 링크
- Arduino UNO R3 구매 링크
- 12V 30x30 팬 구매 링크
- 점퍼 구매 링크
- 강철 막대(직경 4mm, 길이 68mm) 구매 링크
- 압축 스프링 20x9 구매 링크
- 커패시터(50V, 10μF) 구매 링크
- 9g 서보 모터 구매 링크
- 12V 5A 전원 공급 장치 구매 링크
- DC 커넥터(5.5x2.1mm, 12V) 구매 링크
- 베어링(4x12x4, 604ZZ) 구매 링크
- 육각 소켓 머리 나사 M3 구매 링크
- 플랫 헤드 나사 M3 구매 링크
- 접시머리 나사 M3x8 구매 링크
- M3 너트 구매 링크
- Sharpie 영구 마커 구매 링크
- 플라스틱 달걀 구매 링크
- 다양한 실리콘 와이어 구매 링크
공급
단계별 튜토리얼:
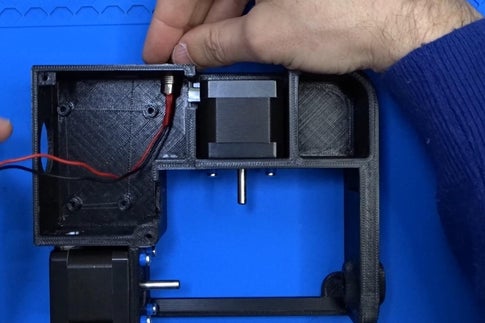
모터 조립
첫 번째 단계는 로봇 팔의 필수 부품인 모터 설치입니다.
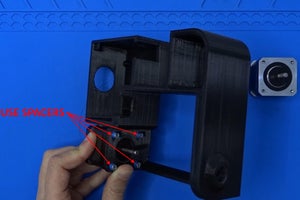
- 달걀 구동 모터는 3D 프린팅된 스페이서와 M3x10 나사를 사용해 장착합니다.
- 마커 홀더 암 모터는 M3x10 나사와 스페이서를 사용하여 아래쪽에 설치합니다. 위쪽은 M3x5 육각 소켓 머리 나사를 활용하여 안정적으로 고정합니다.
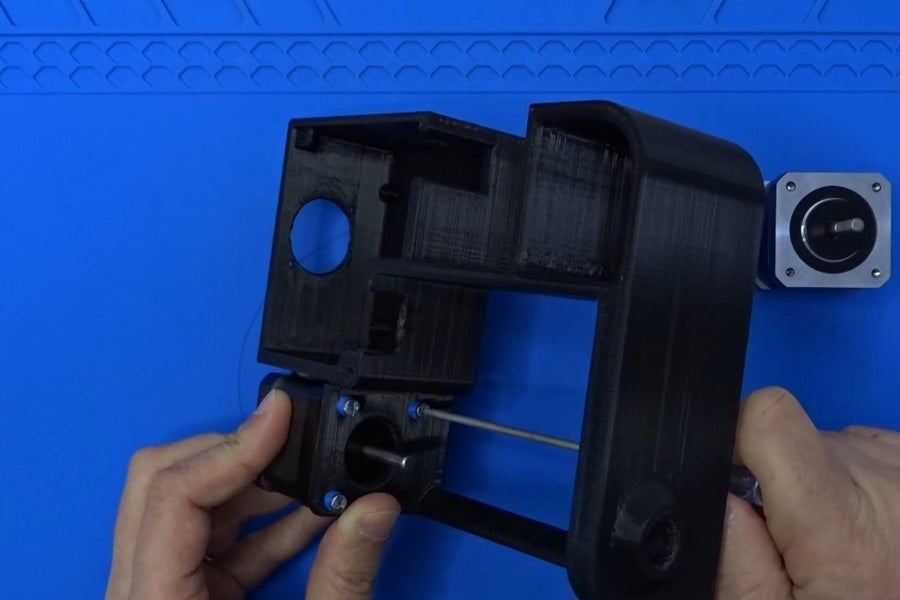
연결 및 프레임 구성
모터 설치 후, 각 부품을 연결하고 나사를 조여 로봇 팔의 기본 구조를 만듭니다. 이때 압축 스프링과 강철 막대를 사용하여 팔이 부드럽게 작동하도록 합니다.
1단계: 모터 조립


달걀 구동 모터 설치
이 모터를 설치하기 위해 3D 프린팅 스페이서가 있는 M3x10 나사를 사용합니다.
마커 홀더 암 모터 설치
이 모터는 M3x10 나사와 스페이서를 사용하여 아래쪽에 장착되고 위쪽에는 간섭을 피하기 위해 프레임에 움푹 들어간 M3x5 육각 소켓 머리 나사를 사용합니다.
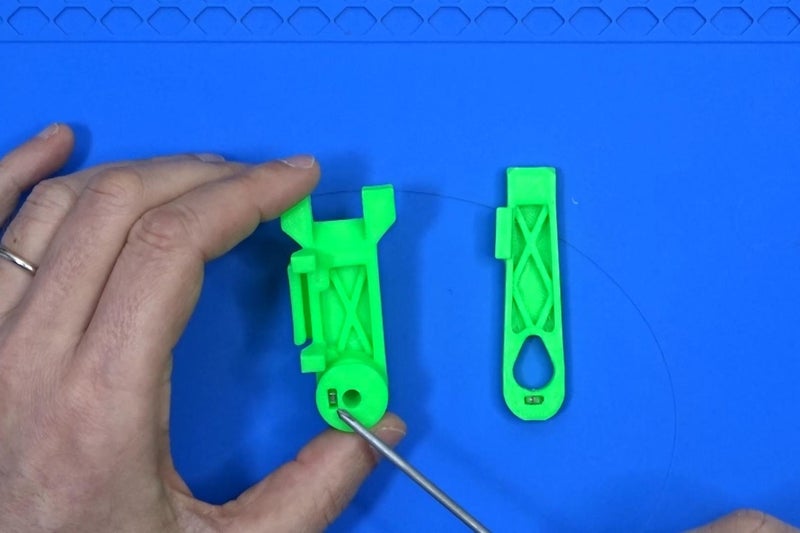
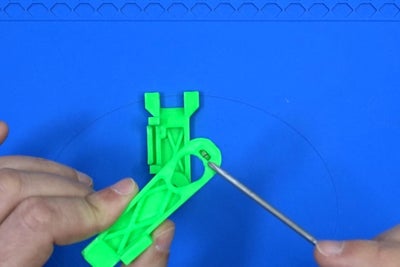
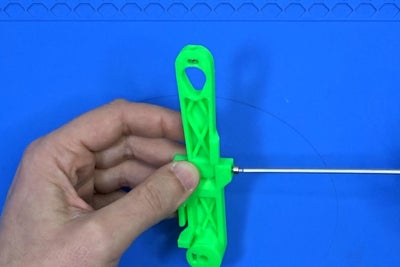
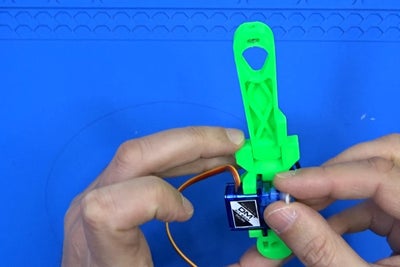
2단계: 마커 홀더 암 조립
3단계: 서보 설치
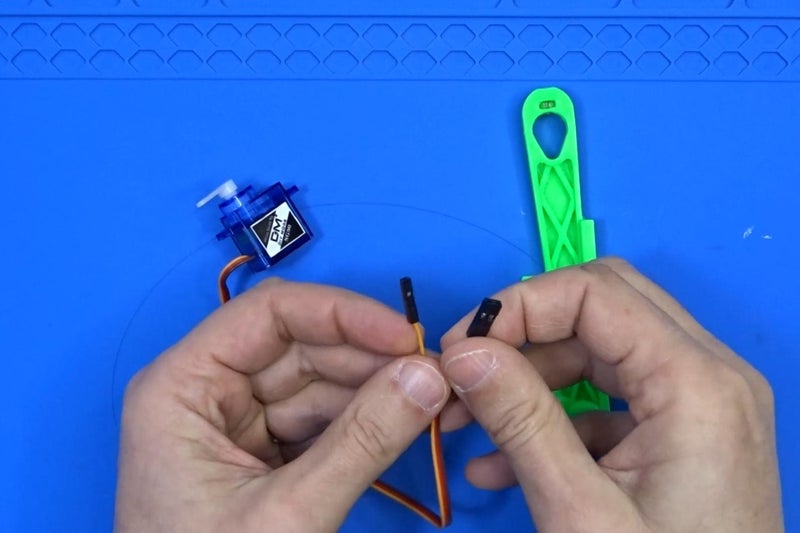
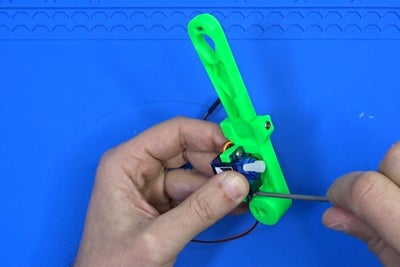
우리는 9g 서보를 사용합니다. 연결하려면:
- 커넥터 수정: 신호선(주황색)을 분리하고 단일 핀을 사용하고 양극 및 음극 와이어는 이중 커넥터에 연결합니다.
- 서보 배치: 홈을 통해 와이어를 배선하여 암을 방해하지 않도록 합니다.
- 제공된 나사로 고정합니다.
4단계: Arduino에 스케치 업로드
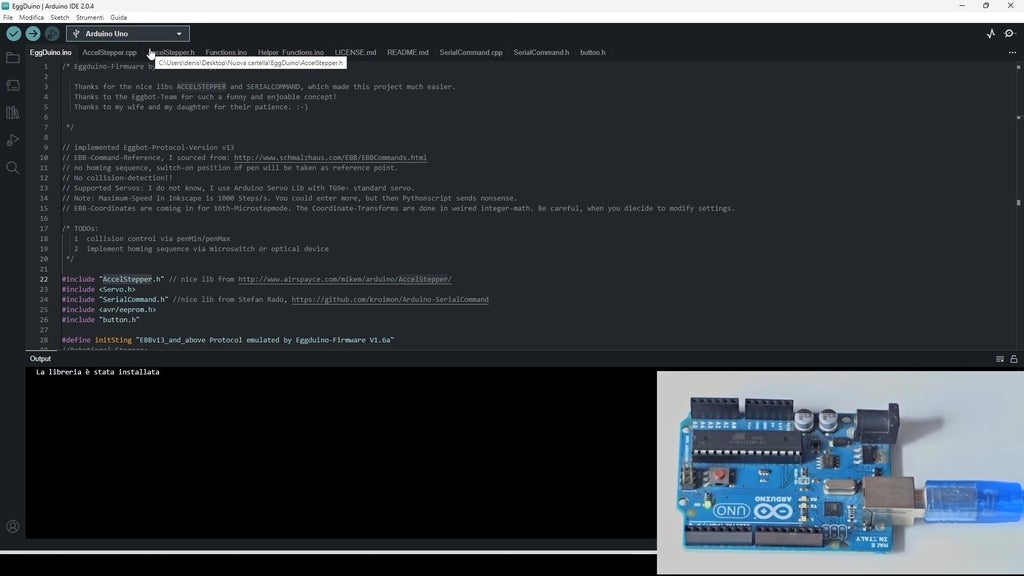
Eggduino.zip 파일을 다운로드하여 압축을 풀고 Arduino IDE를 사용하여 eggduino.ino를 엽니다. 필요한 라이브러리를 설치합니다.
- AccelStepper(라이브러리 관리자에서 사용 가능)
- SerialCommand(ZIP을 통해 수동으로 설치)
아두이노를 PC에 연결하고 아두이노 우노를 보드로 선택한 후 스케치를 업로드합니다.
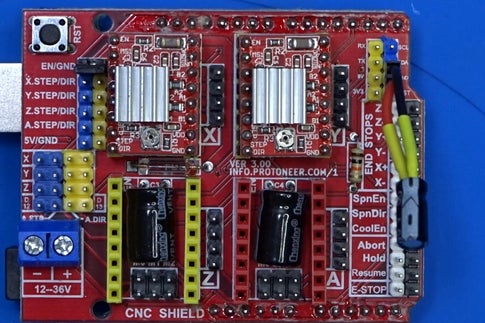
5단계: CNC 쉴드 및 드라이버 조립

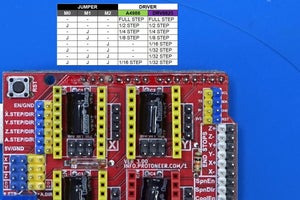
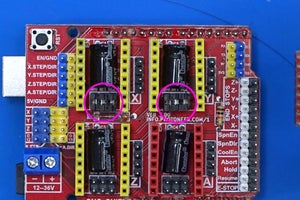
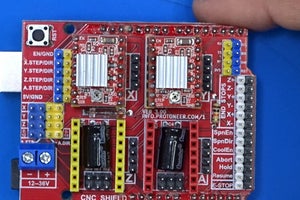
- Arduino Uno에 CNC Shield V3를 설치하고 핀이 올바르게 정렬되었는지 확인합니다.
- A4988 드라이버를 X 및 Y 슬롯에 장착하고 전위차계가 전원 공급 장치를 향하도록 합니다.
- 1/16 스텝 분해능을 달성하기 위해 점퍼를 사용하여 마이크로 스테핑을 구성합니다.
6단계: 드라이버의 Vref 조정
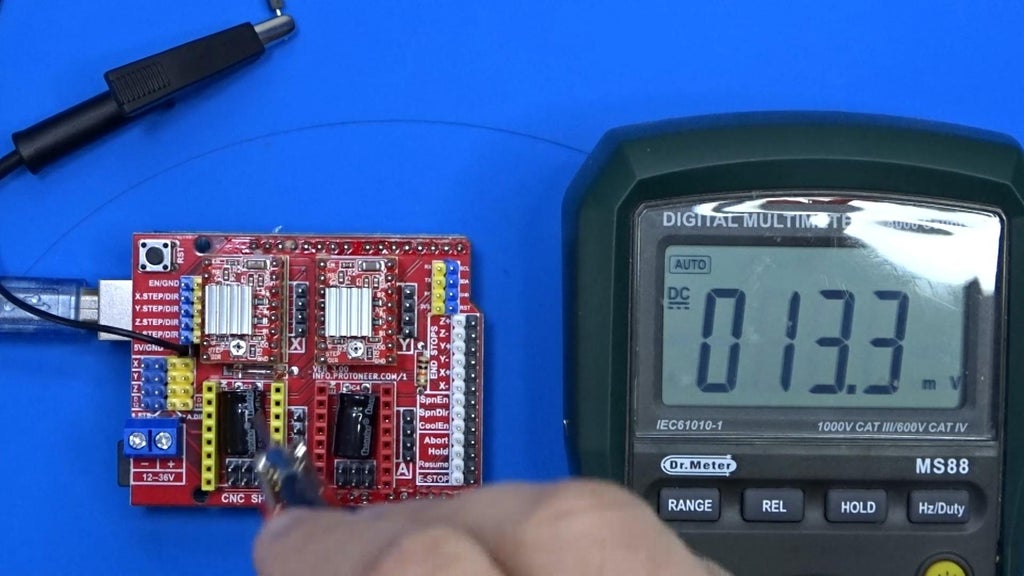
모터의 최대 전류(데이터시트에서)를 기반으로 Vref를 계산하고 멀티미터를 사용하여 전위차계를 조정합니다.
- 멀티미터의 음극 프로브를 GND에 연결합니다.
- 포지티미터 나사에 양극 프로브를 놓습니다.
- 계산된 값에 도달할 때까지 조정합니다.
7단계: 전원 공급 장치 및 최종 조정
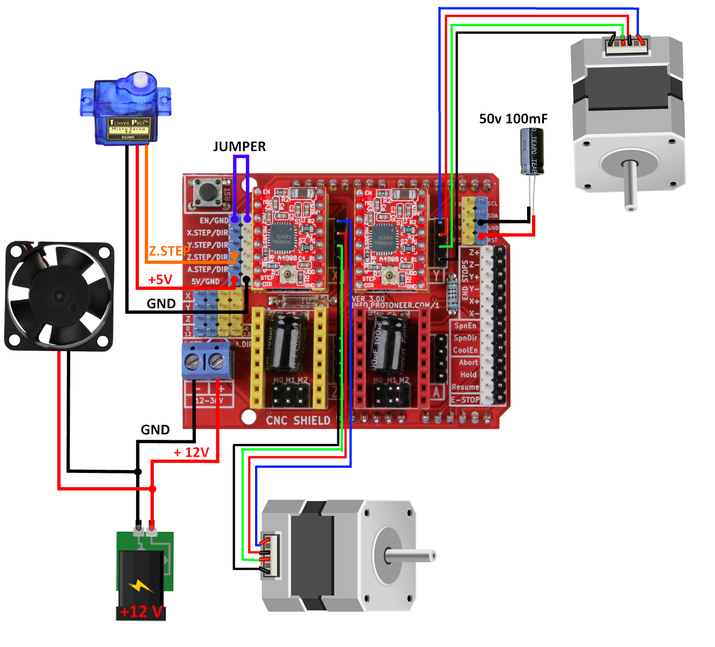

- EN과 GND 사이에 점퍼를 배치하여 보드를 활성화합니다.
- GND와 RESET 사이에 10μF 커패시터를 납땜하여 자동 리셋을 비활성화합니다.
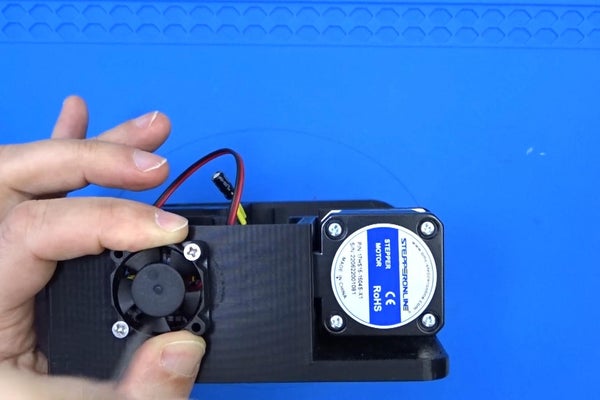
- 냉각을 위해 팬을 CNC 실드에 연결합니다.
- 전원 소켓을 고정하고 케이블을 연결합니다.
- 모터를 연결합니다.
- 암 모터 → 드라이버 Y
- 드라이버 X→ 에그 모터
- 마찰을 증가시키기 위해 고무를 사용하여 베어링과 달걀 롤러를 설치하십시오.
- 전자 제품 덮개를 놓고 사용자 정의 로고를 적용합니다.
8단계: Inkscape로 테스트
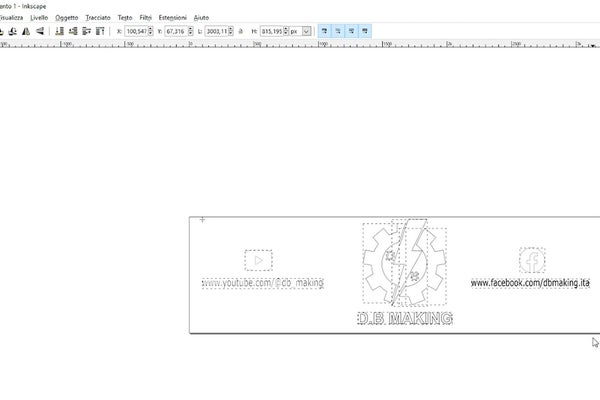

Inkscape 0.91(설명서 참조)을 열고 다음 단계를 수행합니다.
- 문서 크기를 3200x900픽셀로 수정합니다.
- 인쇄하려는 디자인을 붙여넣습니다.
- Eggbot → Eggbot Control→ 확장으로 이동합니다.
- 펜 높이 값을 설정합니다(예: 위/아래로의 경우 55 및 70).
- 테스트 인쇄를 실행하여 모든 것이 올바르게 작동하는지 확인합니다.
테스트가 끝나면 최종 인쇄를 진행할 수 있습니다!
728x90
반응형
'모빌리티 프로젝트' 카테고리의 다른 글
| 멋지고 활공하는 Suzanne 종이비행기 제작 방법 ✈️ (0) | 2025.04.15 |
|---|---|
| 움직이는 야옹 시컬 판지 제작 과정 🎨 (0) | 2025.04.15 |
| Lily∞Bot: 장애물 회피 기능이 있는 교육용 로봇 제작 (0) | 2025.04.04 |
| DIY: 리튬 배터리의 SoC 및 SoH를 표시하는 소형 LED 장치 만들기 (0) | 2025.04.02 |
| DIY 3D 프린팅 Pi 솔라 카 만들기 (0) | 2025.04.02 |



