Lily∞Bot은 Circuit Playground Express, Adafruit Crickit, 3.3V 소나 센서, 3D 프린터로 제작된 부품으로 구성된 장애물 회피 교육용 로봇입니다. 초등학생부터 시작하여 교육 및 프로젝트 목적으로 활용할 수 있는 이 오픈 소스 로봇은 간단한 그래픽 프로그래밍 방식으로 제어됩니다. 아래는 제작부터 프로그래밍까지의 전체 과정을 소개합니다.

1. 로봇 재료 및 구성 요소
Lily∞Bot 제작에 필요한 부품들은 다음과 같습니다:
- 주요 전자 부품:
- Circuit Playground Express
- Adafruit Crickit
- 3.3V 소나 센서
- DC TT 모터 2개
- TT 휠 2개
- AA 배터리 팩(3개)
- 기계적 부품:
- 상부 및 하부 섀시
- 캐스터 휠 2개
- 소나 마운트
- 배터리 팩 마운트
- 컨트롤러 마운트
- 추가 준비물:
- M3 나사 및 잠금 와셔
- 슈퍼글루
- 점퍼 케이블
- 3D 프린터 및 PLA 필라멘트
이 프로젝트는 3.3V 소나 센서로 장애물을 피하기 위해 Adafruit Crickit, Circuit Playground Express가 있는 오픈 소스 3D 프린팅 모듈식 교육용 로봇을 기반으로 합니다. NoireSTEMinist.com/robots https://github.com/merl-Rose-Hulman/
이 프로젝트는 Circuit Playground Express, Crickit, 3.3V 소나 및 2개의 DC 모터를 사용하여 오픈 소스 모듈식 3D 프린팅 로봇인 Lily∞Bot에서 장애물 회피를 수행하는 방법을 설명합니다. 로봇을 제작하고, 하드웨어 및 전자 장치를 배선하고, 로봇을 프로그래밍하는 방법을 설명합니다. 이것은 그래픽 프로그래밍이기 때문에 이 프로젝트는 1-4학년의 초등학생에게 적합합니다. 이 동일한 로봇은 컨트롤러와 프로그래밍 언어를 Circuit Playground Express, Arduino Uno, Raspberry Pi Pico W 등으로 변경하여 사용자와 함께 성장할 수 있습니다. Lily∞Bot에 대한 자세한 내용은 NoireSTEMinist.com/robots 와 YouTube(https://youtube.com/carlottaberry)에서 확인할 수 있습니다.
로봇 로봇 공학 Adafruit 수중 음파 탐지기 장애물 회피 crickit 회로 놀이터 익스프레스 MakeCode
공급
상부 및 하부 섀시, 캐스터 휠 2개, TT DC 모터 2개, TT 휠 2개, 소나 마운트, 배터리 팩 마운트 및 컨트롤러 마운트가 있는 Lily∞Bot 기본 로봇. 자세한 내용은 링크를 참조하십시오.
Circuit Playground Express 및 Crickit이 포함된 Lily∞Bot의 부품 목록은 GITHUB 및 Amazon의 다음 링크에서 찾을 수 있습니다.
https://www.amazon.com/hz/wishlist/ls/16Q4OHY4E8AF3?ref_=wl_share
주요 구성 요소는 GITHUB에서 사용할 수 있는 3D 프린팅 부품입니다.
1단계: 캐스터 휠 부착을 위한 업데이트


캐스터 휠을 부착하여 TT 휠의 접촉 지점보다 약간 위로 올리는 새로운 방법이 있습니다. 다음 이미지를 사용하여 4개의 M3 7mm 팬헤드 또는 납작머리 나사, 4개의 M3 잠금 와셔 및 4개의 M3 와셔가 있는 캐스터 휠을 부착하십시오. 그로브의 하단 섀시 위에 캐스터 휠을 놓습니다. 구멍을 정렬하고 두 개의 M3 5mm 팬헤드 나사를 삽입합니다. 잠금 와셔와 너트를 추가하여 나사로 조이고 조입니다. 두 번째 캐스터 휠에 대해 반복합니다.
2단계: 장착 모듈과 함께 AA 배터리 팩 3개 부착




Circuit Playground Express 및 Crickit은 4-5V로 작동할 수 있으므로 3AA 배터리 팩을 사용하십시오. 컴퓨터의 마이크로 USB에서 실행할 수도 있습니다. 이러한 장치에 전원을 공급하는 방법에 대한 자세한 내용은 다음 링크를 참조하십시오.
- https://learn.adafruit.com/adafruit-crickit-creative-robotic-interactive-construction-kit/powering-crickit
- https://www.adafruit.com/product/3333
배터리 마운트 및 배터리 팩을 추가하려면 다음 지침을 따르십시오.
3AA 배터리 팩 마운트를 하단 섀시 하단에 삽입합니다.
두 개의 3MM M3 팬헤드 나사를 사용하여 하단 섀시 하단에 고정합니다.
리드가 있는 3AA 배터리 팩을 배터리 팩 마운트에 삽입합니다.
3단계: Circuit Playground Express 및 Crickit을 장착 모듈이 있는 로봇에 부착





다음 이미지를 사용하여 Adafruit Crickit 및 Circuit Playground Express를 Lily∞Bot에 연결합니다.
두 개의 M3 7mm 팬헤드 기계 나사를 사용하여 하단 Crickit 마운트를 상단 로봇 섀시에 부착합니다.
4개의 M3 5mm 팬헤드 기계 나사를 사용하여 상단 Crickit 마운트를 하단 Crickit 마운트 위에 부착합니다.
6개의 M3 5mm 팬헤드 기계 나사를 사용하여 Circuit Playground Express를 Adafruit Crickit 상단에 부착합니다.
4단계: 장착 모듈이 있는 3.3V 소나 부착

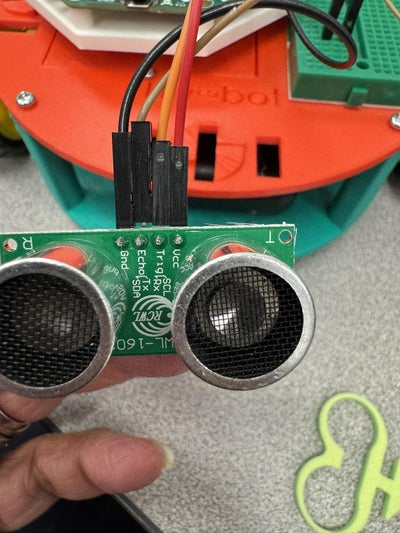




다음 이미지와 같이 3.3V 소나를 갈래가 위로 튀어나오고 화살촉이 아래로 똑딱거리도록 하여 소나 마운트에 삽입합니다.
상부 섀시 전면에 소나 마운트를 삽입하여 시계 반대 방향으로 돌려 잠기도록 합니다. 로봇의 앞면이 Lily∞Bot이라는 단어에 가장 가깝습니다.
핀이 위를 향하도록 하여 3.3V 소나를 소나 마운트에 삽입합니다.
소나 마운트를 로봇의 오른쪽을 향하는 상부 섀시 전면에 떨어뜨립니다.
제자리에 고정될 때까지 마운트를 시계 반대 방향으로 돌립니다.
5단계: 회로도를 사용하여 소나와 모터를 Crickit에 배선하고 Circuit Playground Express 소나용 배선을 Crickit 및 Circuit Playground에 배선합니다.


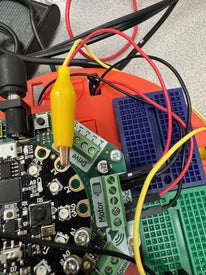

소나를 Crickit 및 Circuit Playground Express에 배선하고 모터를 Crickit에 배선(자세한 내용은 Fritizing 회로도 참조)
- Sonar VCC - Crickit 3.3V 헤더(수-암 와이어 사용)
- 소나 GND - Crickt GND 헤더(암-수 와이어 사용)
- Sonar Trig to Crickit Pin 2 헤더(암-수 와이어 사용)
- Sonar Echo to Circuit Playground Express 핀 A3 (악어-수 와이어 사용)
- 오른쪽 모터 빨간색 선을 모터 1에 연결하고 검은색 선을 모터 GND에 연결합니다.
- 왼쪽 모터의 빨간색 선을 모터 2에 연결하고 검은색 선을 모터 GND에 연결합니다.
6단계: Circuit Playground Express 및 Adafruit Crickit을 사용하여 장애물 회피를 수행하는 Lily∞Bot용 코드 작성

- https://makecode.microbit.org/ 에 마이크로 USB 케이블로 Circuit Playground express 프로그래밍
'모빌리티 프로젝트' 카테고리의 다른 글
| 움직이는 야옹 시컬 판지 제작 과정 🎨 (0) | 2025.04.15 |
|---|---|
| 부활절을 위한 달걀 꾸미기 로봇 팔 만들기 | Eduino 프로젝트 🥚🤖 (0) | 2025.04.09 |
| DIY: 리튬 배터리의 SoC 및 SoH를 표시하는 소형 LED 장치 만들기 (0) | 2025.04.02 |
| DIY 3D 프린팅 Pi 솔라 카 만들기 (0) | 2025.04.02 |
| 로봇 투석기 제작: 자동 장전 및 핸즈프리 컨트롤러 (0) | 2025.03.28 |



