728x90
반응형
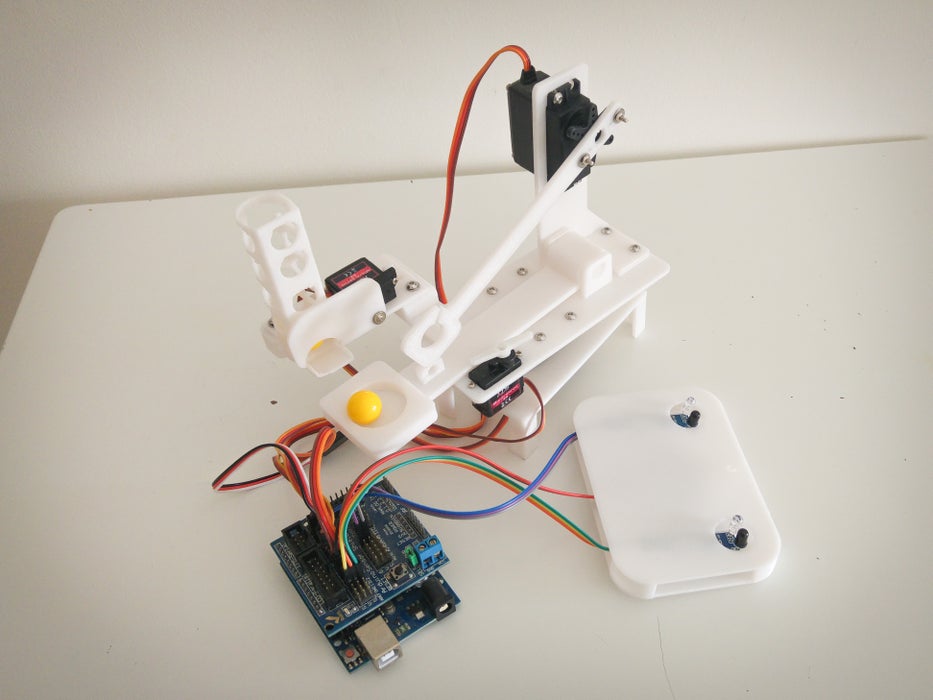
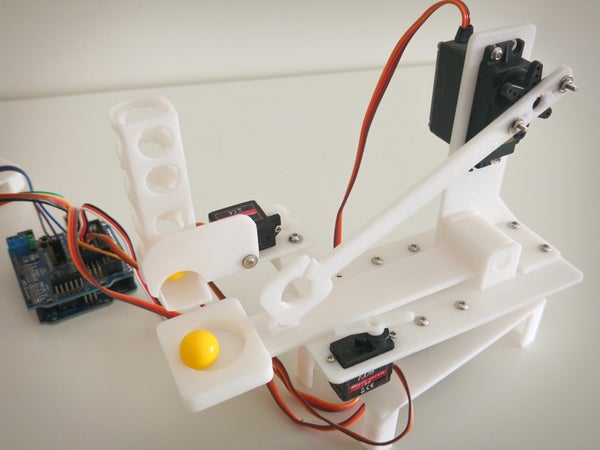
안녕하세요! 이번 포스트에서는 저만의 로봇 투석기 프로젝트를 소개합니다. 이 투석기는 완전히 자동화된 장난감으로, 자동 장전 및 핸즈프리 조작이라는 멋진 기능을 제공합니다. 투석기에는 매거진과 장전 메커니즘이 포함되어 있어 끊임없이 공을 장전하고 발사할 수 있습니다. 이제 여러분도 따라 만들어 보세요!
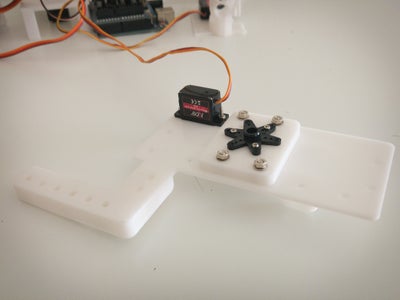
1단계: 투석기 조립
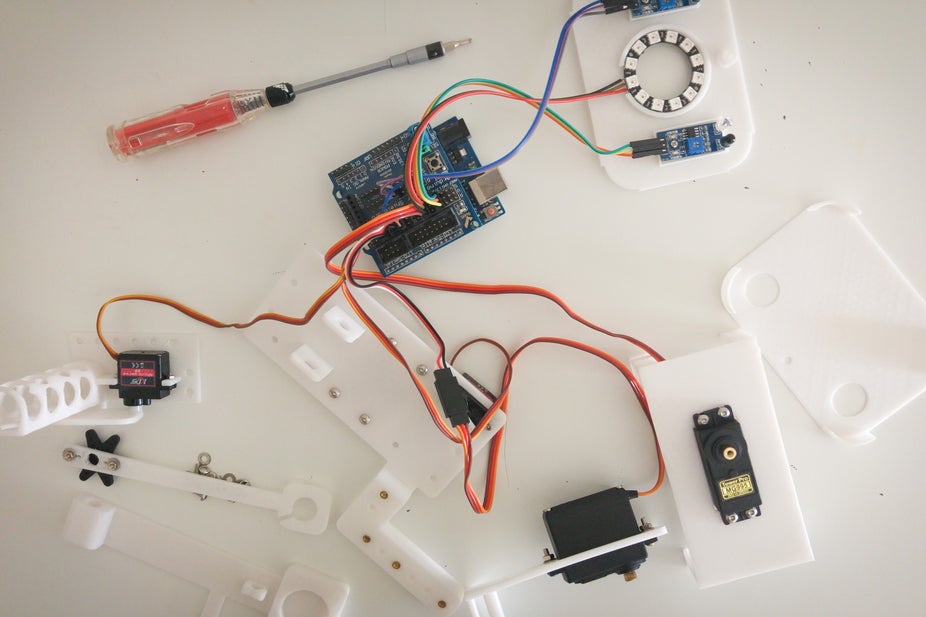
필요한 부품 목록:
- 탄알: 15mm 볼
- 3D 프린팅 부품: 필요한 부품은 여기에서 다운로드 가능
- 전자 및 기타 부품:
- 2x MG995 서보 모터
- 2x SG90 9G 서보 모터
- 아두이노 우노 보드
- Arduino Uno 센서 실드
- 외부 전원 공급 장치 (2A, 5V 권장)
- 나사 및 너트: M3 나사(20개), 너트(20개), 황동 너트(20개), M2 나사 및 너트(8개)
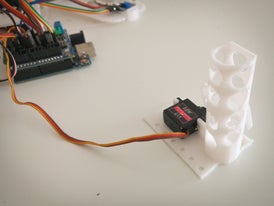
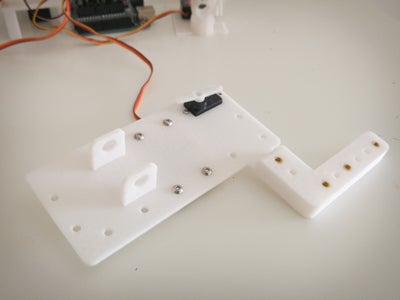
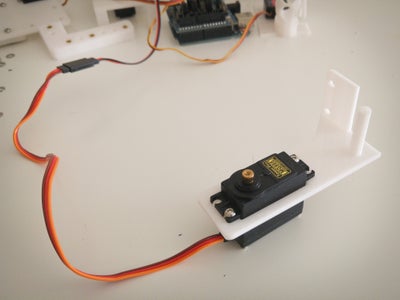
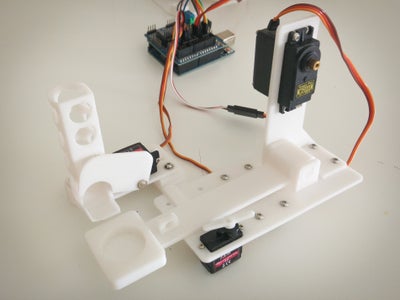
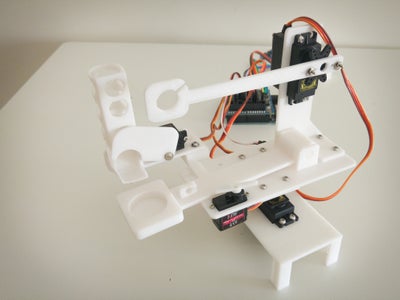
조립 방법:
- 3D 프린팅 부품을 사용해 투석기의 주요 구조를 형성합니다.
- M3 황동 너트를 열로 삽입합니다(납땜 인두를 사용).
- 위에서 언급된 부품들을 순서대로 조립하여 투석기를 완성합니다.


Arduino Catapult - 1562928.zip
8.70MB
controller_bottom.stl
0.06MB
controller_top.stl
0.04MB
2단계: 투석기 회로 연결 및 작동
서보 모터 연결: 서보 모터를 아두이노 우노의 PWM 핀에 연결합니다.
- 베이스 모터: 핀 9
- 트레이 모터: 핀 6
- 암 모터: 핀 5
- 트레이 잠금 모터: 핀 3
전원 공급:
- 외부 전원 공급 장치를 사용하여 서보 모터에 전력을 공급합니다.
- 센서 실드를 전원 공급 장치에 연결하고, 전원 점퍼를 제거하여 외부 전원을 사용하도록 설정합니다.
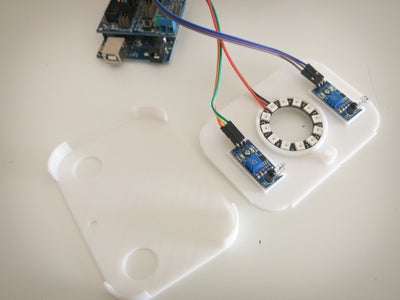
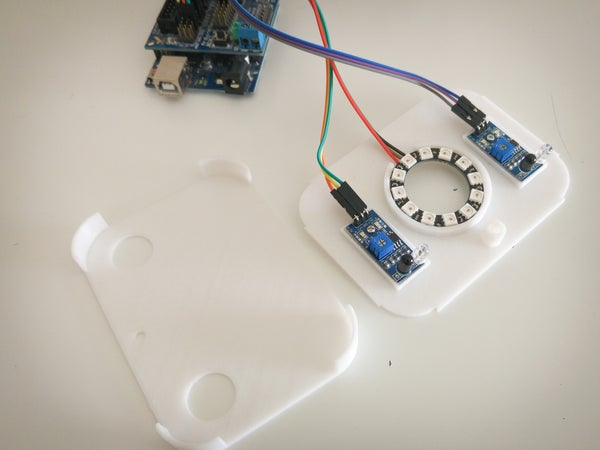
3단계: 코드 작성 및 생명 불어넣기
아래는 투석기를 제어하는 기본 코드를 공유합니다. 핸즈프리 컨트롤러와 애니메이션 LED 링도 포함되어 있습니다!
#include <Servo.h>
#include <Adafruit_NeoPixel.h>
#define PIN_LED_RING 8
#define NUM_PIXELS 12
Servo baseMotor, trayMotor, armMotor, trayLockMotor;
Adafruit_NeoPixel ledRing(NUM_PIXELS, PIN_LED_RING, NEO_GRB + NEO_KHZ800);
#define IR_SENSOR_LEFT 2
#define IR_SENSOR_RIGHT 3
void setup() {
baseMotor.attach(9);
trayMotor.attach(6);
armMotor.attach(5);
trayLockMotor.attach(3);
pinMode(IR_SENSOR_LEFT, INPUT);
pinMode(IR_SENSOR_RIGHT, INPUT);
ledRing.begin();
ledRing.show(); // LED 꺼짐 상태
}
void loop() {
int leftSensor = digitalRead(IR_SENSOR_LEFT);
int rightSensor = digitalRead(IR_SENSOR_RIGHT);
// 센서 상태에 따라 조작
if (leftSensor == HIGH && rightSensor == LOW) {
rotateLeft();
} else if (leftSensor == LOW && rightSensor == HIGH) {
rotateRight();
} else if (leftSensor == HIGH && rightSensor == HIGH) {
fireCatapult();
} else {
idleAnimation();
}
}
void rotateLeft() {
baseMotor.write(45);
}
void rotateRight() {
baseMotor.write(135);
}
void fireCatapult() {
trayMotor.write(90); // 장전
delay(500);
armMotor.write(180); // 발사
delay(500);
trayLockMotor.write(0); // 재장전 위치로
}
void idleAnimation() {
for (int i = 0; i < NUM_PIXELS; i++) {
ledRing.setPixelColor(i, ledRing.Color(0, 0, 255)); // 파란색 애니메이션
}
ledRing.show();
delay(100);
}
#include <Servo.h>
Servo lockServo ;
Servo armServo ;
Servo trayServo ;
Servo baseServo ;
#define lockOpen 110
#define lockClosed 20
#define armOpen 140
#define armArmed 45
#define trayClosed 165
#define trayOpened 155
void rest() {
sweep(lockServo,lockServo.read(),lockOpen,15) ;
sweep(armServo,armServo.read(),armOpen,15) ;
}
void prepareToShoot() {
sweep(lockServo,lockServo.read(),lockClosed,15) ;
sweep(armServo,armServo.read(),armArmed,15) ;
}
void shoot() {
sweep(lockServo,lockServo.read(),lockOpen,15) ;
}
void sweep ( Servo servo , int from , int to , int speed ) {
int pos = 0 ;
if (from < to) {
for (pos = from; pos <= to; pos += 1) {
servo.write(pos);
delay(speed);
}
} else {
for (pos = from; pos >= to; pos -= 1) {
servo.write(pos);
delay(speed);
}
}
}
void trayClose(){
sweep(trayServo,trayServo.read(),trayClosed,22) ;
}
void trayOpen() {
sweep(trayServo,trayServo.read(),trayOpened,22) ;
}
void trayRelease() {
trayClose() ;
trayOpen() ;
trayClose() ;
delay(2000);
}
void setup() {
/// connect servo motors
lockServo.attach(3);
armServo.attach(5);
trayServo.attach(6);
baseServo.attach(9) ;
trayClose();
delay(2500); /// you have time to load bullets
trayRelease();
rest() ;
prepareToShoot() ;
shoot();
rest();
}
void loop() {
/// do your magic here ...
}4단계: LED 링을 활용한 애니메이션 추가
LED 링을 사용하여 투석기에 생동감을 더합니다. 유휴 상태에서는 파란색 애니메이션이 재생되고, IR 센서의 움직임에 따라 방향을 조절하며 발사합니다.
#include <Adafruit_NeoPixel.h>
#include <SoftwareServo.h>
SoftwareServo lockServo ;
SoftwareServo armServo ;
SoftwareServo trayServo ;
SoftwareServo baseServo ;
#define lockOpen 110
#define lockClosed 20
#define armOpen 140
#define armArmed 45
#define trayOpened 164
#define trayClosed 167
#define ringPin 10
#define irPinRight 12
#define irPinLeft 4
int basePos = 90 ;
unsigned long lastTimer = millis();
unsigned long pixelTimer = millis();
int currentPixelLed = 0 ;
Adafruit_NeoPixel strip = Adafruit_NeoPixel(12, ringPin, NEO_GRB + NEO_KHZ800);
void rest() {
sweep(lockServo,lockServo.read(),lockOpen,15) ;
sweep(armServo,armServo.read(),armOpen,15) ;
}
void prepareToShoot() {
sweep(lockServo,lockServo.read(),lockClosed,15) ;
sweep(armServo,armServo.read(),armArmed,15) ;
}
void shoot() {
sweep(lockServo,lockServo.read(),lockOpen,15) ;
}
void sweep ( SoftwareServo &servo , int from , int to , int speed ) {
int pos = 0 ;
if (from < to) {
for (pos = from; pos <= to; pos += 1) {
servo.write(pos);
delay(speed);
SoftwareServo::refresh();
}
} else {
for (pos = from; pos >= to; pos -= 1) {
servo.write(pos);
delay(speed);
SoftwareServo::refresh();
}
}
}
void trayClose(){
sweep(trayServo,trayServo.read(),trayClosed,22) ;
}
void trayOpen() {
sweep(trayServo,trayServo.read(),trayOpened,22) ;
}
void trayRelease() {
trayOpen() ;
trayClose() ;
delay(2000);
}
void ringAllOff() {
for (int pixel = 0 ; pixel<12 ; pixel++ ) {
strip.setPixelColor(pixel, 0, 0, 0);
}
strip.show();
}
#define animIdle 0
#define animTurnRight 1
#define animTurnLeft 2
#define animTurnShoot 3
int animMode = animIdle ;
void animCircle() {
unsigned long currentTimer = millis();
if ( (currentTimer - pixelTimer) > 80 ) {
pixelTimer = currentTimer ;
ringAllOff() ;
strip.setPixelColor(currentPixelLed, 50, 250, 50);
strip.show();
currentPixelLed++ ;
if (currentPixelLed==12) currentPixelLed = 0 ;
}
}
int currentColorRed = 0 ;
int currentColorGreen = 0 ;
int currentColorBlue = 0 ;
void animFade() {
unsigned long currentTimer = millis();
if ( (currentTimer - pixelTimer) > 30 ) {
pixelTimer = currentTimer ;
for (int i = 0 ; i < 12 ; i++) {
strip.setPixelColor(i, currentColorRed/4, currentColorGreen, currentColorBlue/4);
}
strip.show();
currentColorRed+=2 ;
currentColorGreen+=2 ;
currentColorBlue+=2 ;
if (currentColorRed>=255) currentColorRed = 0 ;
if (currentColorGreen>=200) currentColorGreen = 0 ;
if (currentColorBlue>=255) currentColorBlue = 0 ;
}
}
void animRight() {
unsigned long currentTimer = millis();
if ( (currentTimer - pixelTimer) > 10 ) {
pixelTimer = currentTimer ;
ringAllOff() ;
strip.setPixelColor(2, currentColorRed, currentColorRed/2, currentColorRed/3);
strip.setPixelColor(3, currentColorRed, currentColorRed/3, currentColorRed/2);
strip.setPixelColor(4, currentColorRed, currentColorRed/2, currentColorRed/3);
strip.setPixelColor(5, currentColorRed, currentColorRed/3, currentColorRed/2);
strip.setPixelColor(6, currentColorRed, currentColorRed/2, currentColorRed/3);
currentColorRed+=2 ;
if (currentColorRed>=155) currentColorRed = 0 ;
strip.show();
}
}
void animLeft() {
unsigned long currentTimer = millis();
if ( (currentTimer - pixelTimer) > 10 ) {
pixelTimer = currentTimer ;
ringAllOff() ;
strip.setPixelColor(8, currentColorRed, currentColorRed/2, currentColorRed/3);
strip.setPixelColor(9, currentColorRed, currentColorRed/3, currentColorRed/2);
strip.setPixelColor(10, currentColorRed, currentColorRed/2, currentColorRed/3);
strip.setPixelColor(11, currentColorRed, currentColorRed/3, currentColorRed/2);
strip.setPixelColor(0, currentColorRed, currentColorRed/2, currentColorRed/3);
currentColorRed+=2 ;
if (currentColorRed>=155) currentColorRed = 0 ;
strip.show();
}
}
void animShoot() {
for (int i = 0 ; i < 12 ; i++) {
strip.setPixelColor(i, 250, 10, 10);
}
strip.show();
}
void animateRing() {
if (animMode == animIdle) animCircle();
if (animMode == animTurnRight) animRight();
if (animMode == animTurnLeft) animLeft();
}
void setup() {
/// prepare led ring
strip.begin();
strip.show();
strip.setBrightness(128);
animateRing() ;
/// prepare ir sensors
pinMode(irPinRight, INPUT);
pinMode(irPinLeft, INPUT);
/// setup servo motors
lockServo.attach(3);
armServo.attach(5);
trayServo.attach(6);
baseServo.attach(9) ;
/// basic setup
armServo.write(armArmed);
trayServo.write(trayClosed);
lockServo.write(lockOpen);
delay(100);
SoftwareServo::refresh();
armServo.write(armOpen);
delay(100);
SoftwareServo::refresh();
/// test tray
//trayRelease(); trayRelease(); trayRelease();trayRelease(); trayRelease(); trayRelease();
}
void loop() {
animateRing() ;
unsigned long currentTimer = millis();
int l ; int r ;
l = digitalRead(irPinLeft);
r = digitalRead(irPinRight);
if (r == 0 && l == 0) {
if ( (currentTimer - lastTimer) > 250 ) {
lastTimer = currentTimer ;
/// shoot!!!!
animShoot();
trayRelease();
rest() ;
prepareToShoot() ;
shoot();
rest();
}
} else if (r == 0 || l == 0 ) {
if ( (currentTimer - lastTimer) > 25 ) {
lastTimer = currentTimer ;
if (r==0) {
basePos-- ;
animMode = animTurnLeft ;
} else {
basePos++ ;
animMode = animTurnRight ;
}
baseServo.write(basePos);
}
} else {
animMode = animIdle ;
}
SoftwareServo::refresh();
}
이로써 자동화된 로봇 투석기를 완성할 수 있습니다! 여러분의 프로젝트에 활력을 불어넣길 바라며, 궁금한 점은 언제든지 댓글로 남겨주세요. 즐거운 제작 되세요! 🚀
728x90
반응형
'모빌리티 프로젝트' 카테고리의 다른 글
| DIY: 리튬 배터리의 SoC 및 SoH를 표시하는 소형 LED 장치 만들기 (0) | 2025.04.02 |
|---|---|
| DIY 3D 프린팅 Pi 솔라 카 만들기 (0) | 2025.04.02 |
| Bob The Robot: 아두이노 기반 로봇 프레임워크 제작기 (0) | 2025.03.28 |
| 4족 이동 로봇 설계 및 제작 (0) | 2025.03.25 |
| 3D 프린팅 온로드 RC 경주용 자동차 프로젝트 (0) | 2025.03.21 |



