728x90
반응형
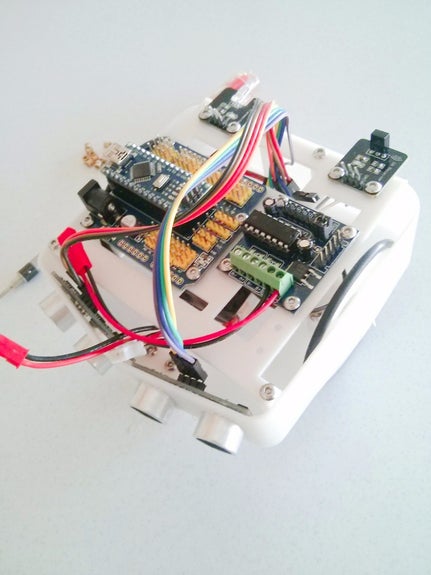
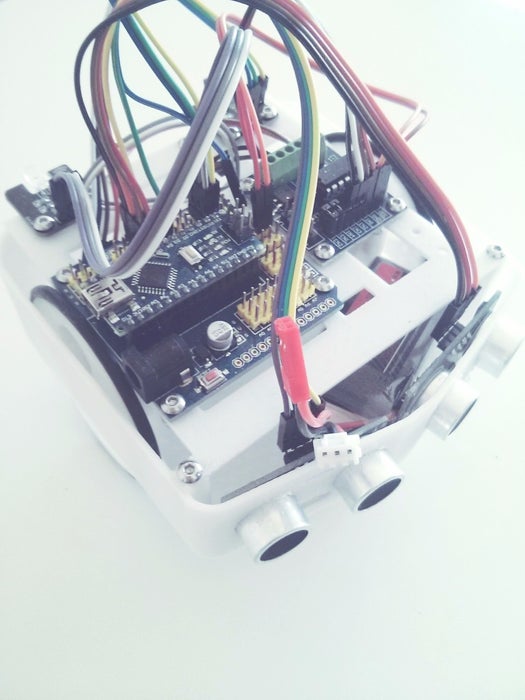
안녕하세요, 이번 포스트에서는 제가 직접 개발한 아두이노 기반 로봇 프레임워크, ‘Bob The Robot’을 소개합니다. Bob은 두 개의 초음파 센서와 기어드 n20 모터를 사용하여 빠르고 효율적인 반응을 제공합니다. 게다가 프레임과 바퀴는 모두 3D 프린팅이 가능하여 저렴하면서도 유연하게 제작할 수 있습니다. 로봇 떼(Swarm Robotics) 프로젝트를 염두에 두고 설계되었기 때문에 여러 대를 제작하여 확장성이 뛰어난 구조를 자랑합니다.

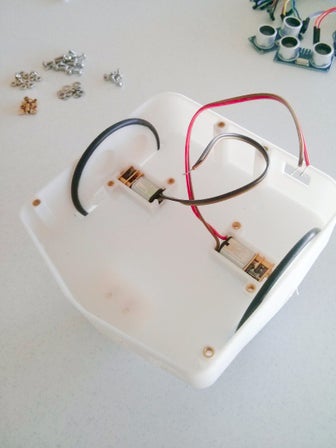
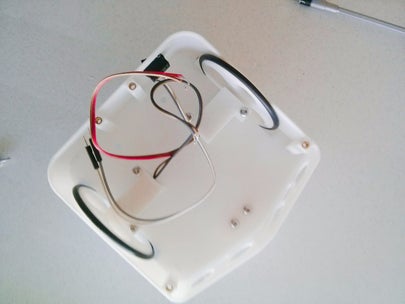
1단계: 3D 프린팅 및 조립
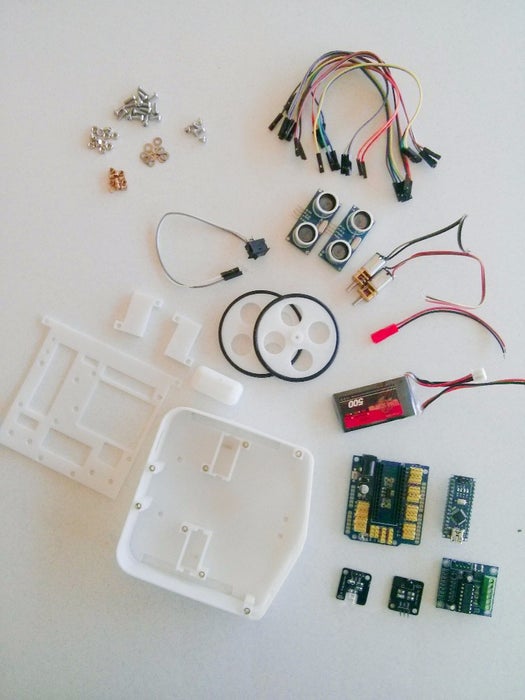
Bob의 제작에 필요한 부품들은 다음과 같습니다:
- 3D 프린팅 부품
- 프레임, 바퀴 및 기타 부품: Thingiverse에서 다운로드
- 필수 하드웨어
- M3 나사 (10mm) 및 너트
- 기계적인 니트릴 고무 O 반지 (휠 타이어용)
- 황동 널링 너트 (M3 나사용)
- 전자 부품
- 아두이노 나노
- Arduino 나노 센서 쉴드
- 미니 L293D 모터 쉴드
- 2x 초음파 HC-SR04 센서
- 2x n20 100RPM 미니 메탈 기어 모터
- 배터리: Wild Scorpion 7.4V 1100mAh
- 미니 2 핀 SPST ON-OFF 스위치
- 연결용 전선 (암-암 포함)


 Bob The Robot - 1409401.zip
6.25MB
Bob The Robot - 1409401.zip
6.25MB
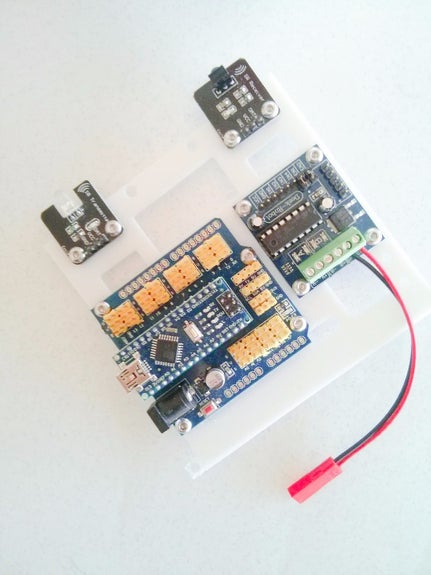
2단계: 회로 연결
아래는 Bob The Robot의 기본 회로도입니다:
부품연결 사항
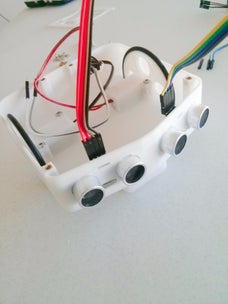
| 초음파 센서 | Trig/echo 핀을 아두이노 디지털 핀에 연결 |
| n20 모터 | L293D 모터 쉴드의 출력 핀에 연결 |
| 배터리 | 모터 쉴드의 전원 입력 단자에 연결 |
| ON/OFF 스위치 | 배터리와 아두이노 전원 사이에 연결 |
회로 설명:
- 초음파 센서는 로봇의 주변 환경을 감지해 장애물을 피하도록 설계되었습니다.
- 모터 쉴드는 두 개의 n20 모터를 제어하며, 속도와 방향을 조절할 수 있습니다.
- 배터리와 스위치는 전체 시스템에 전력을 공급하며 안전한 동작을 보장합니다.
3단계: 코드 작성
아래는 기본 코드 샘플입니다:
#include <NewPing.h>
#define TRIG_PIN 3
#define ECHO_PIN 4
#define MAX_DISTANCE 200
#define MOTOR_LEFT_FORWARD 5
#define MOTOR_LEFT_BACKWARD 6
#define MOTOR_RIGHT_FORWARD 9
#define MOTOR_RIGHT_BACKWARD 10
NewPing sonar(TRIG_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
pinMode(MOTOR_LEFT_FORWARD, OUTPUT);
pinMode(MOTOR_LEFT_BACKWARD, OUTPUT);
pinMode(MOTOR_RIGHT_FORWARD, OUTPUT);
pinMode(MOTOR_RIGHT_BACKWARD, OUTPUT);
}
void loop() {
int distance = sonar.ping_cm();
if (distance > 0 && distance < 20) {
// 장애물 감지 시 후진
moveBackward();
} else {
// 장애물이 없으면 전진
moveForward();
}
}
void moveForward() {
digitalWrite(MOTOR_LEFT_FORWARD, HIGH);
digitalWrite(MOTOR_RIGHT_FORWARD, HIGH);
digitalWrite(MOTOR_LEFT_BACKWARD, LOW);
digitalWrite(MOTOR_RIGHT_BACKWARD, LOW);
}
void moveBackward() {
digitalWrite(MOTOR_LEFT_FORWARD, LOW);
digitalWrite(MOTOR_RIGHT_FORWARD, LOW);
digitalWrite(MOTOR_LEFT_BACKWARD, HIGH);
digitalWrite(MOTOR_RIGHT_BACKWARD, HIGH);
}
이 포스트를 통해 여러분의 로봇 제작에 영감을 줄 수 있기를 바랍니다. 추가 질문이나 개선 사항이 있다면 언제든지 댓글로 남겨주세요. 함께 더 멋진 로봇을 만들어가요! 🚀
728x90
반응형
'모빌리티 프로젝트' 카테고리의 다른 글
| DIY 3D 프린팅 Pi 솔라 카 만들기 (0) | 2025.04.02 |
|---|---|
| 로봇 투석기 제작: 자동 장전 및 핸즈프리 컨트롤러 (0) | 2025.03.28 |
| 4족 이동 로봇 설계 및 제작 (0) | 2025.03.25 |
| 3D 프린팅 온로드 RC 경주용 자동차 프로젝트 (0) | 2025.03.21 |
| [속보] 국민연금 개혁: 첫째 출산 및 군복무 크레디트 최대 12개월 인정 확대 (0) | 2025.03.20 |



