728x90
반응형
친근한 워킹 로봇 만들기 - WalkBot 기본 버전
안녕하세요! 모빌리티키즈입니다.
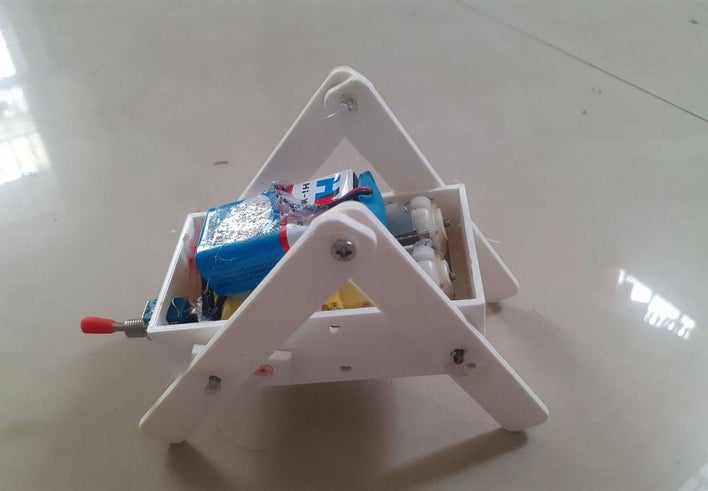
오늘은 친근한 워킹 로봇인 WalkBot을 만드는 프로젝트에 대해 알려드리겠습니다. WalkBot은 모터와 배터리의 도움을 받아 움직이는 로봇이며, 작은 다리와 몸통 부품을 3D 프린팅하여 새로운 로봇 친구를 만드는 것과 같이 블럭을 조립하는 방식으로 제작됩니다. 이 부품들은 전선과 스위치로 연결됩니다. 아래의 단계를 따라 WalkBot을 만들어보세요.
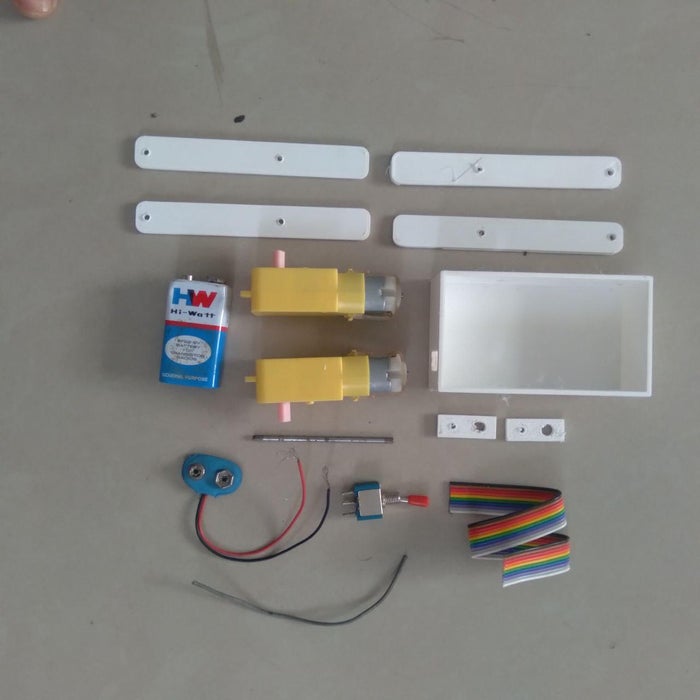
준비물 확인하기:
3D 프린터: 작은 다리와 몸통 부품을 3D 프린팅할 수 있는 3D 프린터가 필요합니다.
모터: WalkBot을 움직이게 할 모터를 준비해야 합니다.
배터리: 모터를 작동시키기 위한 배터리가 필요합니다.
전선: 부품들을 연결하기 위한 전선을 준비하세요.
스위치: 로봇을 켜고 끌 수 있는 스위치를 준비합니다.
다리와 몸통 부품 3D 프린팅하기:
3D 프린터를 사용하여 작은 다리와 몸통 부품을 프린팅합니다. 이 부품들은 로봇의 다리와 몸통을 구성하는 블럭처럼 사용됩니다.
부품들 연결하기:
다리와 몸통 부품을 전선과 스위치를 사용하여 연결합니다. 모터를 다리 부품에 부착하고 배터리와 스위치를 몸통 부품에 연결하세요.
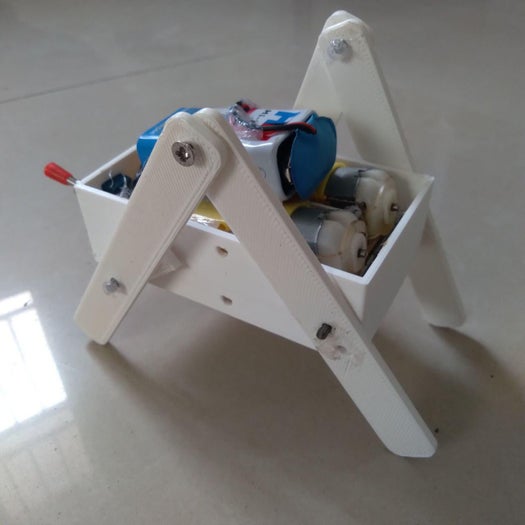
WalkBot 조립하기:
준비한 부품들을 조립하여 WalkBot을 완성시킵니다. 다리 부품을 몸통 부품에 연결하고, 전선과 스위치를 적절히 배치하세요.
동작 테스트하기:
WalkBot의 스위치를 켜서 모터가 작동하는지 확인해보세요. 로봇이 움직이는지 확인하고, 필요에 따라 부품들을 조정하여 움직임을 최적화하세요.
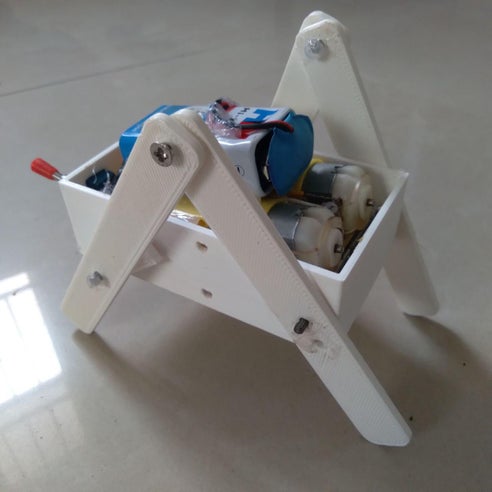
이제 WalkBot이 완성되었습니다! 친근하고 재미있는 워킹 로봇을 만들었습니다. 추가로 기능을 개선하거나 더 많은 부품을 추가하여 WalkBot을 더욱 발전시킬 수도 있습니다.
공급



자료:
- BO DC 모터(설계에 따른 수량)
- 9V 배터리
- 3D 프린터 필라멘트
- 3D 프린터
- 스위치
- 점퍼 와이어
- 나사와 너트
도구:
- 드라이버
- 납땜
- 와이어 커터
- 3D 프린터
1단계: Fusion360에서 설계
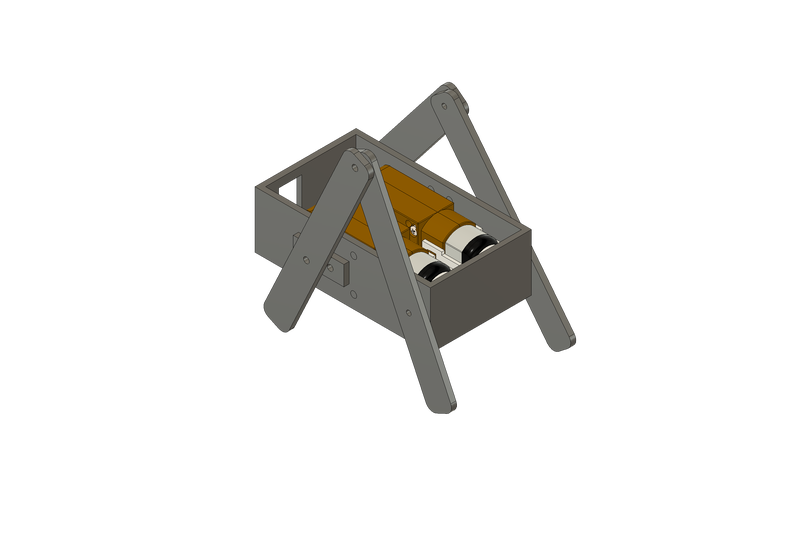

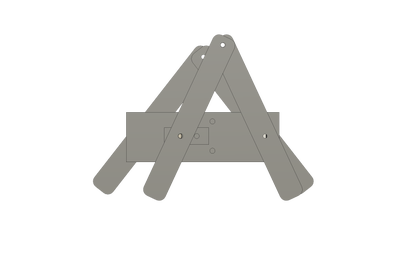
Fusion360 소프트웨어를 사용하여 다리와 몸체 부분을 설계할 수 있습니다. 모터와 배선을 수용할 수 있도록 부품이 비어 있는지 확인하십시오.
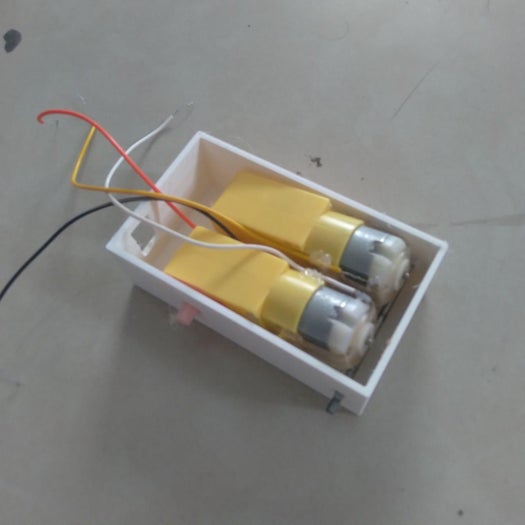
- 2개의 BO 모터를 나란히 수용하고 인클로저를 만듭니다.
- 모터 샤프트가 옆으로 나온다는 것을 고려하십시오.
- 모터를 구속하기 위해 구멍을 사용하거나 이를 위해 글루건을 사용합니다.
- WalkBot의 다리를 만드십시오.
- 로봇의 피벗점을 추가합니다.
- 다리와 모터 커넥터를 추가합니다.
- 부품 두께 2mm를 추가합니다.
- 설계 완료 후 각 파트를 로 내보냅니다. 3D 인쇄를 위한 STL 파일.
2단계: 3D 프린팅
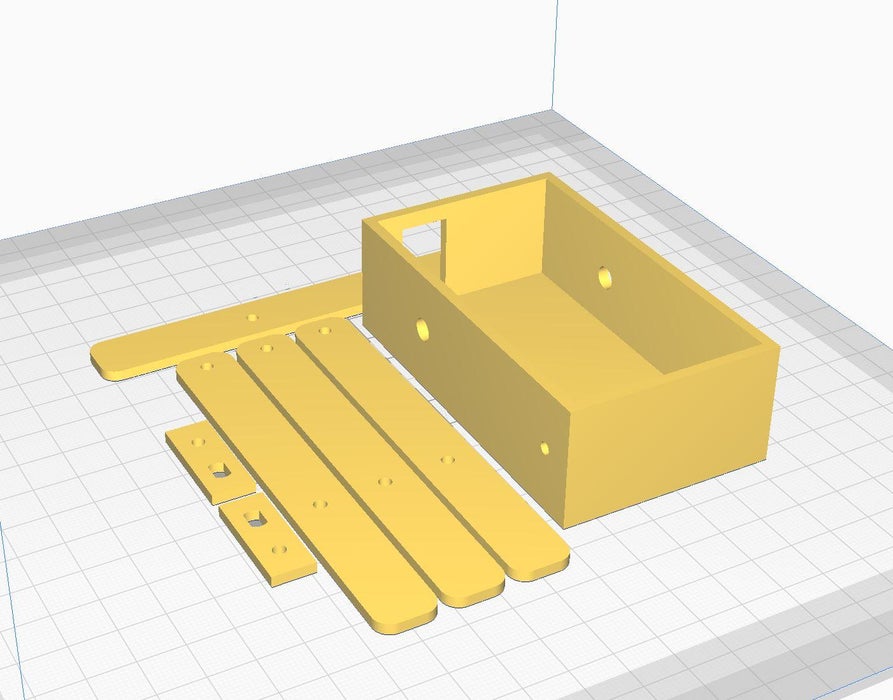



3D 인쇄를 하기 전에 GCODE 파일을 만들기 위해 STL 파일을 슬라이스해야 합니다.
슬라이싱에 CURA를 사용합니다.
붙이고 있습니다. 아래의 케이싱 및 다리에 대한 STL 파일.
매개 변수.
- 층 두께=0.2 mm
- 벽 = 2
- 위쪽/아래쪽=3
- 채우기=30%
- 재질 = PLA
- 속도 = 45mm / s
- 지원 = 아니요.
좋은 3D 인쇄를 위해 위의 매개 변수를 사용하십시오.
Component2.stl
0.03MB
Component1.stl
0.02MB
component3.stl
0.15MB
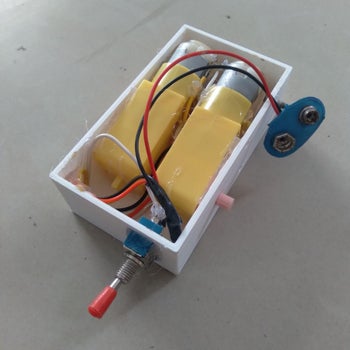
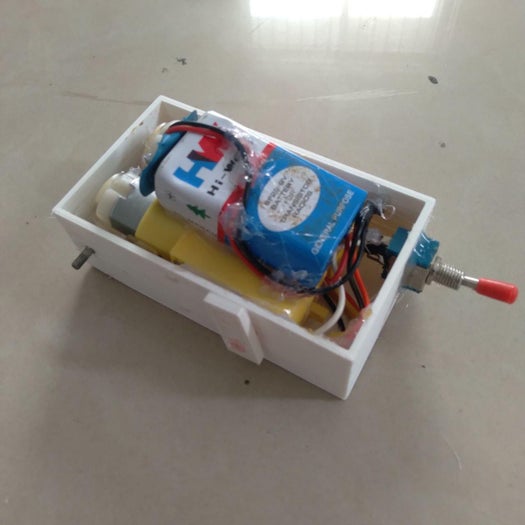
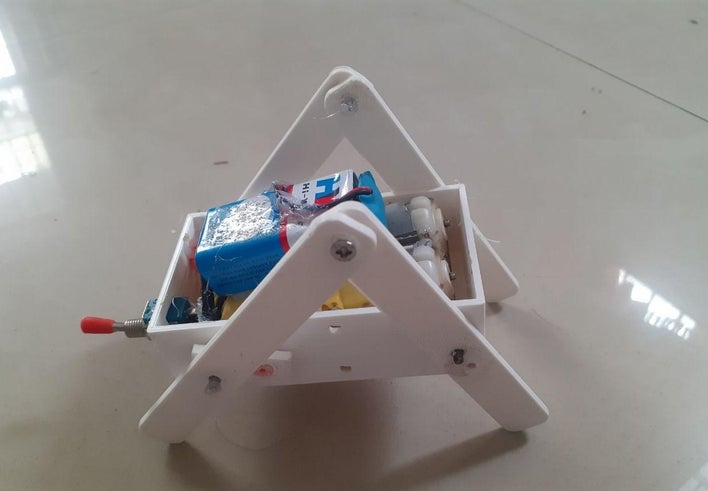
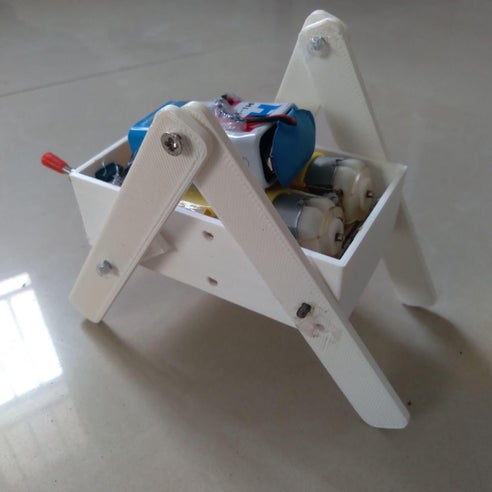
3단계: 조립
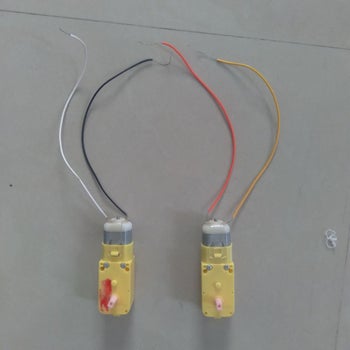


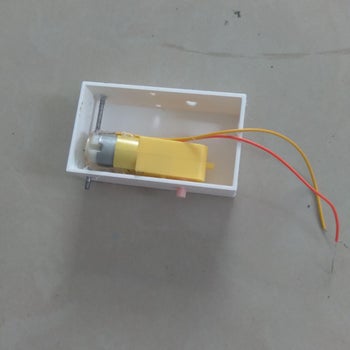
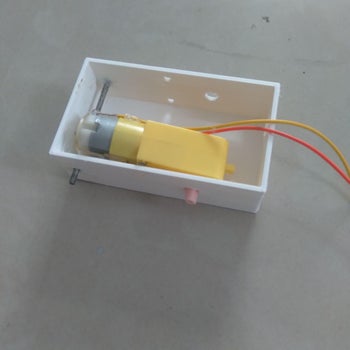
모터 부착: 나사와 너트를 사용하여 BO DC 모터를 3D 프린팅된 다리에 고정합니다. 안정성을 제공하기 위해 단단히 부착되었는지 확인하십시오.
신체 부위 연결: 3D 프린팅된 신체 부위를 조립하여 배터리와 스위치를 위한 공간을 남겨 둡니다. 나사를 사용하여 부품을 단단히 연결하십시오.
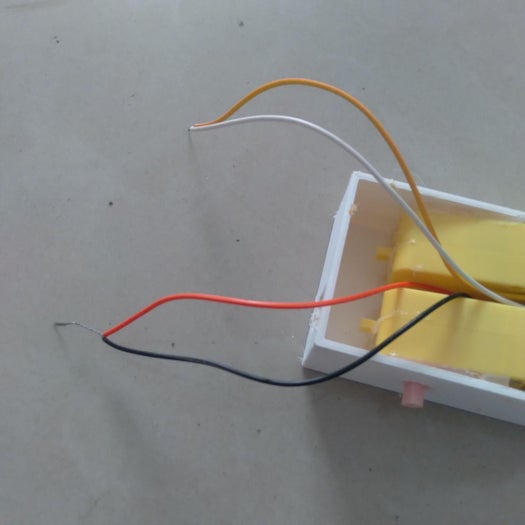
와이어 모터: 점퍼 와이어를 사용하여 모터를 배터리에 연결합니다. 필요한 경우 모터 드라이버를 사용하여 모터 속도와 방향을 제어하십시오.
스위치 추가: 스위치를 설계에 통합하여 쉽게 액세스할 수 있도록 합니다. 배터리에 연결하여 전원 공급을 제어합니다.
4단계: 전기 연결
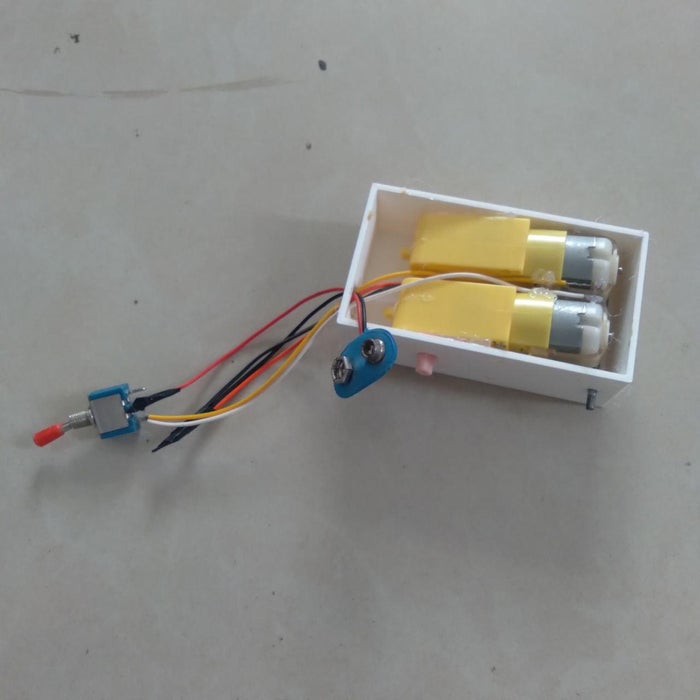

모터를 스위치에 연결: 점퍼 와이어를 사용하여 모터와 스위치를 연결합니다. 손상을 방지하기 위해 적절한 극성을 확인하십시오.
배터리 연결: 9V 배터리를 스위치와 모터에 연결합니다. 단락을 방지하기 위해 연결을 다시 확인하십시오.
5단계: 테스트 및 마무리
파워 업: 스위치를 켜고 보행봇의 움직임을 관찰합니다. 모터 연결부 또는 본체 부품을 필요에 따라 조정하십시오.
미세 조정: 최적의 성능을 위해 보행 로봇의 디자인, 무게 분포 또는 다리 움직임을 조정합니다.
구성 요소 고정: 성능이 만족스러우면 추가 나사나 접착제를 사용하여 모든 구성 요소를 제자리에 고정합니다.
728x90
반응형
'로봇프로젝트' 카테고리의 다른 글
| TinkerCAD를 사용한 Sokoban 로봇 제작 - Sokoban Robot Using L0Cost Robot Controller With FPV - Designed With TinkerCAD (1) | 2023.12.01 |
|---|---|
| SiRoAT - 5V 마이크로컨트롤러용 로봇 (0) | 2023.12.01 |
| 6족 메커니즘이 있는 로봇 (0) | 2023.11.29 |
| 3D 프린터로 제작된 로봇 - Brainy Botic - a 3D Printed Robot Controlled by an Arduino Nano (0) | 2023.11.29 |
| 파란 로봇 개미 - Blue Robot Ant (1) | 2023.11.27 |



