728x90
반응형
SiRoAT는 다양한 마이크로컨트롤러와 함께 작동할 수 있는 로봇입니다. 이로써 로봇 클럽에서 여러 대의 로봇을 만들고, 다양한 마이크로컨트롤러를 소개하는 데 사용할 수 있습니다.
특히 아두이노 나노, NodeMCU 또는 ESP32 Cam으로 로봇을 실행할 수 있도록 하였습니다.
또한 SiRo에는 캐스터 휠이 있었지만, 모든 캐스터 휠이 동일한 크기를 가지고 있지 않아 로봇을 위한 적절한 캐스터 휠을 구매하는 데 어려움이 있었습니다. 그래서 캐스터 휠을 제거하고 대신 3D 프린터로 지지대를 출력하도록 변경하였습니다. 이로써 로봇을 만드는 데는 더욱 간단해지지만, 출력하는 데는 더 많은 시간이 소요됩니다. SiRo는 제 프린터에서 약 1시간 반이면 출력할 수 있지만, SiRoAT는 4시간이 걸립니다.
이 로봇의 부품은 상당히 저렴하며, 재료 비용은 $20 미만으로 구성될 것으로 예상됩니다. 물론 거주하는 지역과 사용하는 마이크로컨트롤러에 따라 다를 수 있습니다.
공급

자료:
4 x M3 30mm 나사
2 x M3 6mm 나사
4 x M3 스페이서
8 x M3 너트
2 x TT130 모터
TT2 모터용 휠 130개
L298N 듀얼 H 브리지 모터 컨트롤러
1 x 미니 브레드보드
1 x 9볼트 배터리 + 배터리 홀더
약간의 와이어. 가능하면 두 가지 다른 색상으로
남성-여성 점프 와이어
양면 테이프의 작은 조각
3D 프린터용 필라멘트
도구:
3D 프린터
납땜
드라이버
와이어커터
1단계: 3D 프린팅
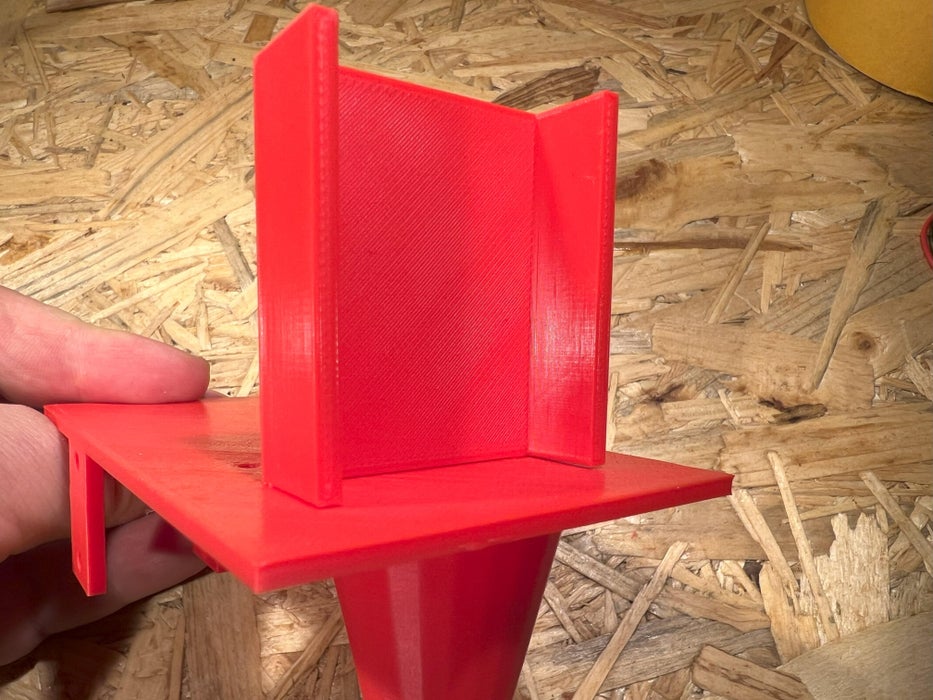
첫 번째 단계는 즐겨찾기 슬라이서에서 stl 파일을 슬라이스하고 섀시와 홀더를 인쇄하는 것입니다.
그런 다음 두 부품을 조립합니다. 프린터에 따라 접착제 한 방울을 떨어뜨려야 할 수도 있습니다.
SiRoAT+Chasis.stl
0.10MB
SiRoAT+Holder.stl
0.00MB
2단계: 모터에 전선 납땜

3D 프린터를 기다리는 동안 모터에 와이어를 납땜하여 시작할 수 있습니다. 각각 4cm여야 하는 12개의 와이어를 벗겨내고 모터에 납땜합니다. 가능하다면 두 가지 색상의 전선을 사용하는 것이 좋습니다. 그것은 단지 그들을 추적하는 것을 더 쉽게 만듭니다.
3단계: 모터 설치

다음 단계에서는 4 x 30mm 나사, 4 개의 너트 및 모터가 필요합니다.
그림과 같이 모터를 설치하십시오.
4단계: L298N 준비



먼저 L298N에 스페이서를 설치합니다.
나사 커넥터 단자를 사용하여 배터리 홀더를 왼쪽과 중앙의 구멍에 설치합니다.
그런 다음 두 개의 전선을 중간 및 오른쪽 구멍에 연결합니다.
5단계: L298N 설치

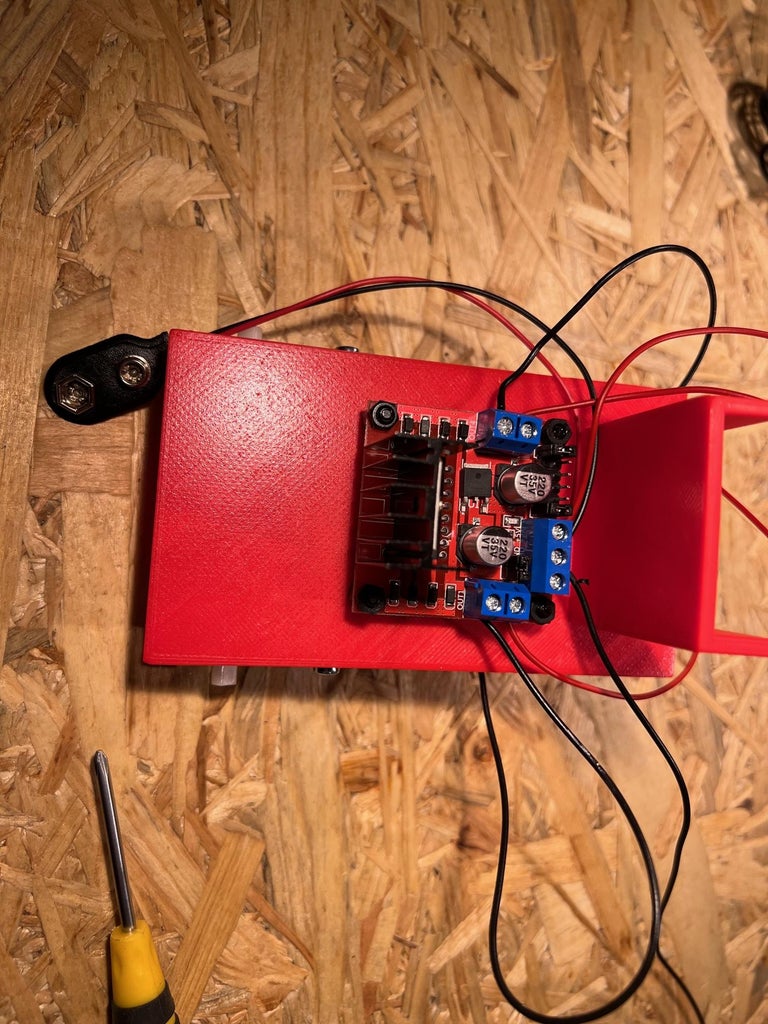
섀시에 L298N을 설치합니다.
그런 다음 모터의 전선을 L298N에 나사로 고정합니다.
6단계: 다른 부품 설치

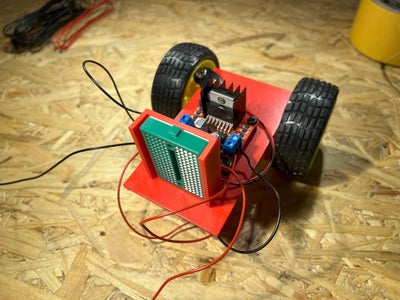

모터에 바퀴를 끼우십시오.
미니 브레드보드에서 보호 용지를 제거하고 홀더에 부착합니다.
양면 테이프를 가져다가 smar 자동차 뒤쪽에 놓고 그 위에 배터리를 놓습니다.
7단계: 점프와이어
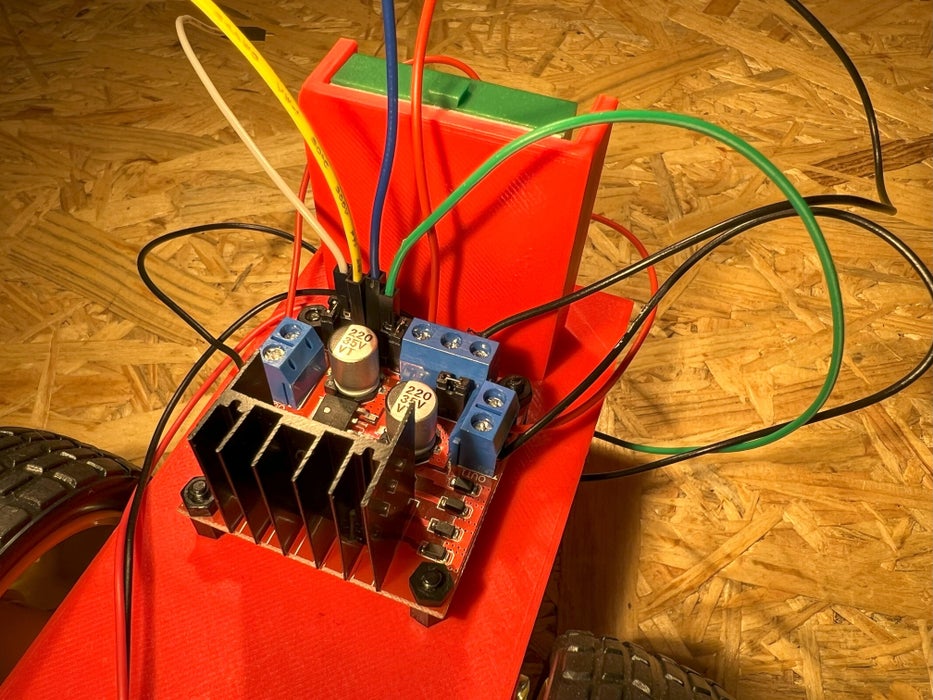
L298N에 점프 와이어를 놓습니다. 와이어의 암 연결을 사용하여 4개의 점프 와이어를 장착할 수 있어야 합니다.
8단계: 마이크로 컨트롤러 설치

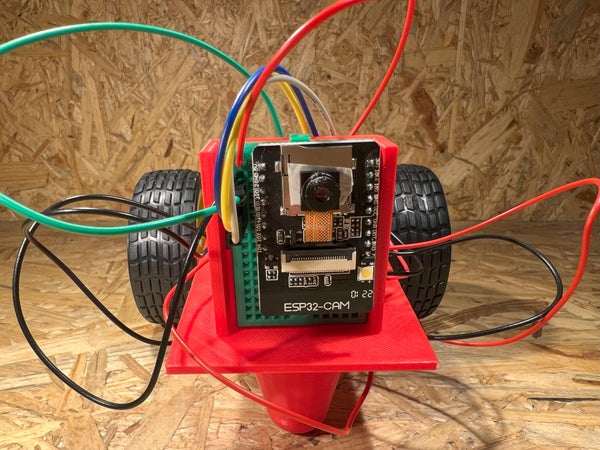
이제 사용하려는 마이크로 컨트롤러를 브레드 기판에 놓습니다.
배선은 사용하려는 마이크로 컨트롤러와 액세스하려는 핀에 따라 다릅니다.
L298N의 나사 커넥터 단자에 연결된 두 개의 와이어는 5볼트를 공급합니다.
점프 와이어는 모터를 쌍으로 제어합니다.
따라서 왼쪽에 있는 두 개는 왼쪽 모터를 제어합니다. 오른쪽에 있는 두 개는 오른쪽 모터를 제어합니다. 모터를 구동하려면 하나의 점프 와이어가 높아야 하고 다른 하나는 낮아야 합니다.
여기에서 두 가지 예를 볼 수 있습니다. 하나는 아두이노 나노가 있고 다른 하나는 ESP32 캠이 있습니다.
728x90
반응형
'로봇프로젝트' 카테고리의 다른 글
| 체이스 탱크 로봇 만들기 (0) | 2023.12.11 |
|---|---|
| TinkerCAD를 사용한 Sokoban 로봇 제작 - Sokoban Robot Using L0Cost Robot Controller With FPV - Designed With TinkerCAD (1) | 2023.12.01 |
| 친근한 워킹 로봇 만들기 - WalkBot 기본 버전 (0) | 2023.12.01 |
| 6족 메커니즘이 있는 로봇 (0) | 2023.11.29 |
| 3D 프린터로 제작된 로봇 - Brainy Botic - a 3D Printed Robot Controlled by an Arduino Nano (0) | 2023.11.29 |



