728x90
반응형
태양열 장애물 회피 자동차 프로젝트에 대해 자세히 설명해 드리겠습니다. 이 프로젝트는 친환경 기술과 로봇 공학을 결합하여 지속 가능한 운송 솔루션을 제시하는 멋진 아이디어입니다. 아래의 단계를 따라 이 자동차를 제작해 보세요.

필요한 재료
Arduino 보드: 전체 시스템의 제어를 담당합니다.
초음파 센서: 장애물을 감지하기 위한 센서입니다.
DC 모터: 자동차의 구동을 위한 모터입니다.
태양광 패널: 태양 에너지를 전기로 변환하여 시스템에 공급합니다.
모터 드라이버: DC 모터의 속도와 방향을 제어하기 위한 드라이버입니다.
배터리: 태양광 패널이 충분한 에너지를 공급하지 못할 때를 대비한 보조 배터리.
차체 프레임: 자동차의 구조를 구성할 프레임.
바퀴: 자동차의 이동을 위한 바퀴.
전선 및 연결 부품: 배선 및 연결을 위한 부품들.
1단계: 설계 및 조립
차체 설계: 자동차의 프레임을 설계하여 조립합니다.
모터 장착: DC 모터를 프레임에 장착하고 바퀴를 연결합니다.
태양광 패널 장착: 태양광 패널을 자동차 상단에 장착하여 최대한의 햇빛을 받을 수 있도록 합니다.
2단계: 전기 회로 구성
Arduino와 센서 연결: 초음파 센서를 Arduino 보드에 연결합니다. 이 센서는 장애물의 거리를 측정합니다.
모터 드라이버 연결: DC 모터를 모터 드라이버와 연결하고, 드라이버를 Arduino에 연결합니다.
전원 공급: 태양광 패널과 보조 배터리를 연결하여 전원을 공급합니다.
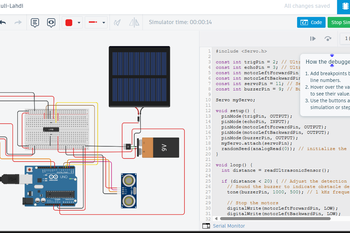
3단계: 프로그래밍
Arduino 코드 작성: Arduino IDE를 사용하여 자동차의 작동 방식과 장애물 회피 알고리즘을 프로그래밍합니다. 기본적인 로직은 다음과 같습니다:
초음파 센서로부터 거리 데이터를 수집합니다.
장애물이 가까워지면 모터의 방향을 변경하여 피하도록 합니다.
Arduino, 초음파 센서 및 DC 모터를 사용하여 자율적으로 장애물을 탐색합니다. 친환경 혁신을 위해 설계된 이 전시회는 로봇 공학과 재생 에너지를 결합하여 지속 가능한 운송 솔루션을 만드는 방법을 보여줍니다. 자동차는 실시간으로 장애물을 감지하고 피하며 제어 시스템을 위해 전적으로 태양 에너지에 의존하여 자율 주행 차량의 친환경 기술 잠재력을 강조합니다.
목적과 영감:
이 프로젝트는 태양 에너지와 로봇 공학을 결합하여 깨끗하고 지속 가능한 기술의 탐구를 촉진하려는 열망에서 비롯되었습니다. 이 차를 개발함으로써 태양 에너지가 어떻게 실용적인 자율 시스템을 구동할 수 있는지 보여주고, 로봇 공학 및 운송 분야에서 친환경 기술에 대한 추가 실험에 영감을 불어넣고자 합니다.
공급
모든 새로운 구성 요소가 추가된 업데이트된 목록은 다음과 같습니다.
자료:
- 아두이노 보드
- 초음파 센서
- 직류 전동기
- L293D 모터 드라이버
-태양 전지판
- 충전식 배터리
- 서보 모터
- 바퀴와 섀시
- 전압 조정기
-브레드보드
- 점퍼 와이어
- 다이오드 및 커패시터
- 종이 클립
- PLA 필라멘트
- 볼 베어링
-톱니바퀴
- 금속 막대
- 핫 글루
-버저
도구:
-납땜
- 3D 프린터
- 드라이버 세트
- 와이어 커터 및 스트리퍼
-멀티 미터
-랩톱
1단계: 섀시 조립
바퀴를 섀시에 부착하여 DC 모터에 단단히 고정되었는지 확인했습니다. 그런 다음 마찰을 줄이고 움직임을 개선하기 위해 볼 베어링을 삽입했습니다. 볼 베어링의 중앙을 통과하는 금속 막대를 액슬로 배치하고 기어를 사용하여 모터를 바퀴에 연결하여 추가 토크를 추가했습니다. 스티어링 제어를 위해 서보 모터를 섀시 전면에 고정했습니다. 모든 것이 제자리에 놓이면 뜨거운 접착제를 사용하여 각 부품을 고정했습니다.
2 단계 : 전자 장치 연결

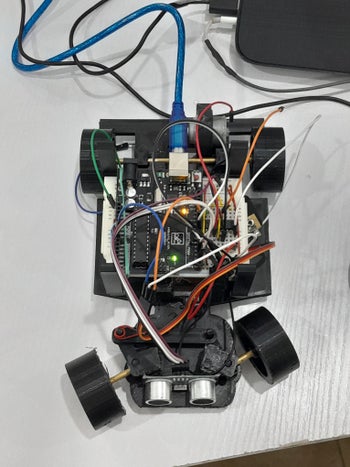
Arduino 보드를 섀시에 배치하고 정확한 장애물 감지를 위해 앞을 향하도록 핫 글루로 초음파 센서를 전면에 부착했습니다. 너무 많은 전선과 얽히는 것을 방지하기 위해 종이 클립을 사용하여 모터 드라이버를 브레드보드의 Arduino 보드에 연결했습니다. DC 모터의 방향을 제어하기 위해 L293D 모터 드라이버를 연결했습니다. 그런 다음 장애물이 감지되면 경고음이 울리는 부저를 부착했습니다. 점퍼 와이어와 종이 클립을 사용하여 스티어링용 서보 모터를 포함하여 회로도에 따라 모든 것을 연결했습니다. 재차 확인 후 모든 연결을 고정하고 전선을 깔끔하게 정리했습니다.
3단계: 태양 전지판 및 배터리 설치
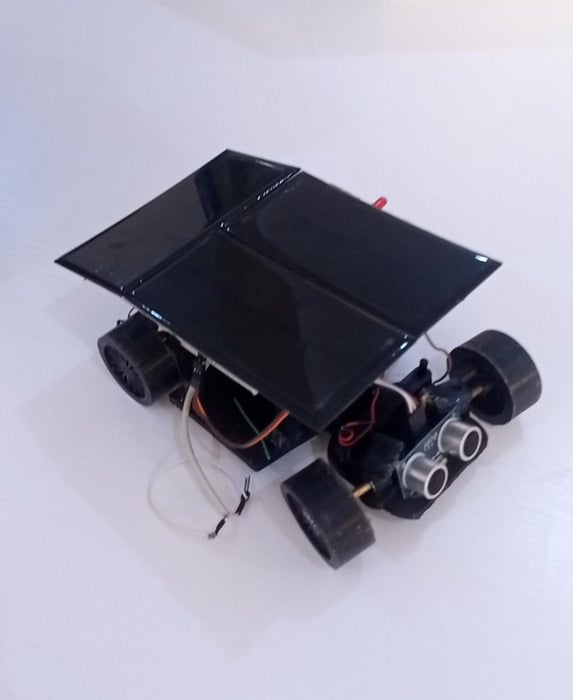
나는 각각 2v의 출력을 가진 3개의 태양 전지판을 직렬로 연결했으며 총 출력은 6v입니다. 3D 프린팅한 태양열 스탠드를 사용하여 태양 전지판을 섀시 위에 배치하고 햇빛 노출을 최대화하도록 배치했습니다. 전압 조정기에 연결하여 전원 출력을 안정화한 다음 태양 에너지가 낮을 때 백업 전원으로 충전식 배터리를 추가했습니다.
4단계: 테스트 및 조정
테스트 주행: 자동차를 주행시켜 장애물 회피 기능이 제대로 작동하는지 확인합니다.
조정 및 개선: 필요에 따라 센서의 감도와 모터의 속도를 조정하여 성능을 개선합니다.
5단계: 교육 및 전시
프로젝트 발표: 이 자동차의 기능과 친환경 기술의 중요성을 설명하며 전시합니다.
추가 실험: 이후 태양 에너지와 로봇 공학을 활용한 다른 프로젝트에 대한 아이디어를 발전시켜 나가세요.
이 프로젝트를 통해 태양 에너지가 실제로 어떻게 자율 시스템을 구동할 수 있는지 보여줄 수 있으며, 지속 가능한 기술에 대한 관심을 더욱 높일 수 있습니다. 추가적인 질문이나 도움이 필요하시면 언제든지 말씀해 주세요!
728x90
반응형
'로봇프로젝트' 카테고리의 다른 글
| 이륜 셀프 밸런싱 로봇 (0) | 2025.03.17 |
|---|---|
| Arduino를 사용하여 집에서 인간 추적 로봇을 만드는 방법 (2) | 2024.12.06 |
| 아두이노를 이용한 자가 연주 우쿨렐레 로봇 (0) | 2024.09.19 |
| DC 모터를 사용하는 Doodlebot (1) | 2024.09.03 |
| 체이스 탱크 로봇 만들기 (0) | 2023.12.11 |



