집에서 Arduino를 사용하여 인간 추적 로봇을 만드는 방법에 대해 설명해 드릴게요. 이 프로젝트는 재미있고 실무적인 경험을 제공할 뿐만 아니라 로봇 공학과 프로그래밍에 대한 이해를 깊게 할 수 있는 좋은 기회입니다.
준비물
- Arduino Uno: 로봇의 두뇌 역할을 합니다.
- 서보 모터: 로봇의 움직임을 제어합니다.
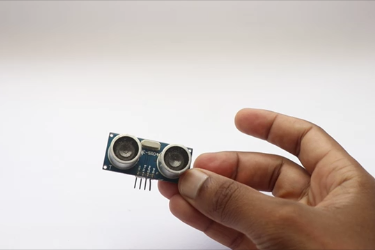
- 초음파 센서 (HC-SR04): 거리 감지용입니다.
- 전원 공급 장치: 배터리 팩이나 USB 케이블을 사용할 수 있습니다.
- 브레드보드와 점퍼 와이어: 회로 연결에 필요합니다.
- 로봇 섀시: 모든 부품을 고정할 기본 구조입니다.
회로도
- 초음파 센서를 Arduino의 트리거 핀(D12)과 에코 핀(D11)에 연결합니다.
- 서보 모터를 D9과 GND, VCC에 연결합니다.
- 모든 부품을 전원 공급 장치에 연결하여 로봇에 전원을 공급합니다.
Arduino 코드
다음은 기본적인 Arduino 코드 예제입니다:
#include <Servo.h>
Servo servo;
int trigPin = 12;
int echoPin = 11;
long duration;
int distance;
void setup() {
servo.attach(9);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = duration * 0.034 / 2;
if (distance < 30) {
servo.write(90); // 예를 들어, 특정 각도로 회전
} else {
servo.write(0);
}
Serial.print("Distance: ");
Serial.println(distance);
delay(100);
}
조립 및 테스트
모든 구성 요소를 연결하고 코드를 업로드한 후 로봇을 테스트해 보세요. 초음파 센서가 물체를 감지하면 서보 모터가 작동해 로봇이 해당 물체를 따라 움직일 것입니다.
이제 필요한 모든 재료를 모아 조립해 보세요! 프로젝트를 진행하면서 궁금한 점이 생기면 언제든지 도와드릴게요. 즐거운 로봇 만들기 되세요! 🚀🤖
공급


이 프로젝트를 빌드하는 데 필요한 구성 요소 목록은 다음과 같습니다
아두이노 우노는 이쪽으로부터
L298N 모터 구동기
IR 센서 모듈 x 2
바퀴
마분지의 장
가위
뜨거운 접착제
브레드보드
점퍼 케이블
아두이노 IDE
프로그래밍 케이블
친절하게 이것들은 제품 링크가 아마존과 연결되어 있으며 자격을 갖춘 판매에 따라 추가 비용없이 수수료의 작은 퍼센트를받을 수 있습니다, 이것은 내가 너희들을 돕기 위해 그런 훌륭한 아이디어로 오는 데 도움이 될 것입니다
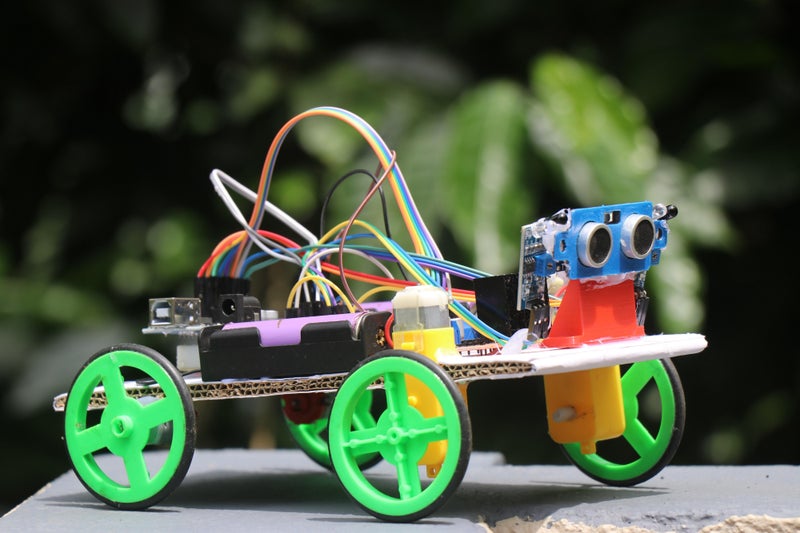
1단계: 차체 만들기
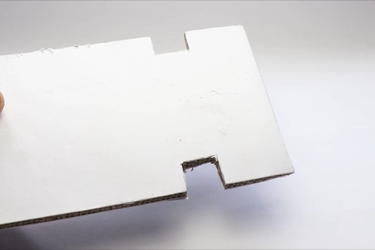
모터와 휠을 추가하기 전에 수행해야 하는 첫 번째 단계는 프레임이며, 이 프레임뿐만 아니라 모든 전자 부품을 고정할 책임이 있습니다.
로봇 자동차의 프레임을 만들 때 사용할 수 있는 몇 가지 옵션이 있지만 저는 간단하면서도 효과적인 솔루션을 선택했습니다.
나는 마분지 구조를 사용할 것입니다, 나는 모든 전자 제품의 크기를 고려하여 이전에 마분지에 표시를 했습니다.
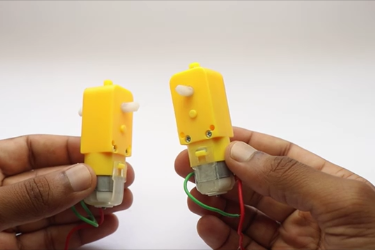
BO 모터 또는 기어 모터가 프레임의 대부분의 공간을 차지하는 것처럼 부르는 소수는 이를 호출하며 우리가 사용하는 휠 유형도 중요한 역할을 합니다.
이러한 모든 요소를 고려하여 내가이 디자인을 만들었고 내가 만든 최선의 선택이었습니다.이 디자인은 로봇을 멋지게 보이게 할뿐만 아니라 모든 전자 장치의 케이스 역할을합니다.
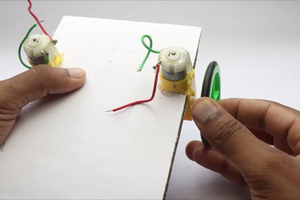
영역을 표시하고 가위로 자르고 BO 모터를 넣고 뜨거운 접착제로 고정합니다.
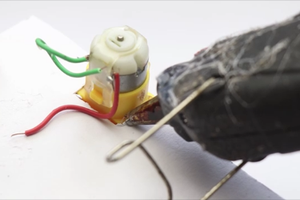
나중에 전자 회로 부품으로 쉽게 작업할 수 있도록 전선을 BO 모터에 미리 납땜했습니다.
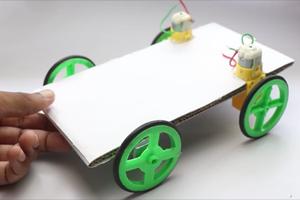
BO 모터를 부착 한 후 바퀴를 추가 할 수 있으며, 사용하려는 바퀴 유형은 사용자에게 맡겨져 있습니다.
모터가 완전히 건조되도록 하고 뒷바퀴의 경우 일반 장난감 DC 모터의 샤프트에 바퀴를 추가하기만 하면 뜨거운 접착제를 사용하여 프레임에 접착하여 부드럽게 움직이는 뒷바퀴 역할을 합니다.
2단계: 코드 및 회로
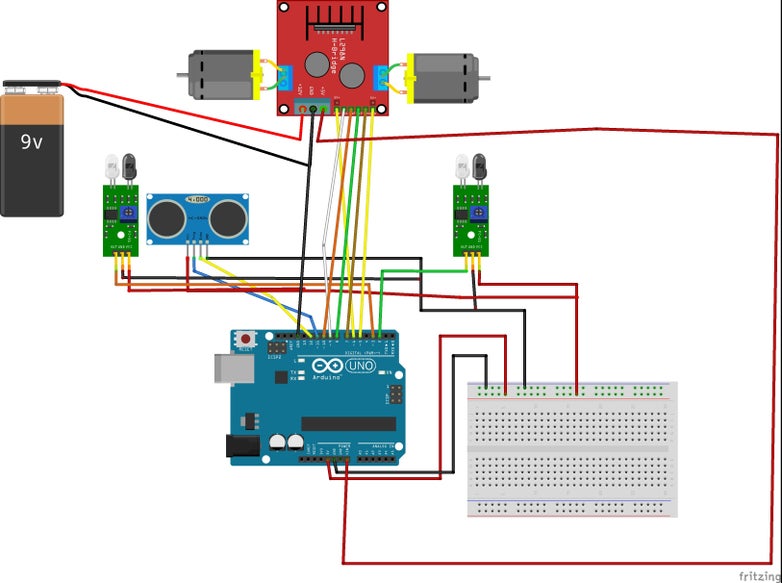
다음은이 프로젝트를 만드는 데 사용 된 회로이며, 모든 사람이 쉽게 사용할 수 있도록 더 세분화 할 것입니다.
구성 요소를 현명하게 설명하고 아래에서 방법을 볼 수 있습니다.
L298N 모터 드라이버 연결
Ena에서 D6로, Enb에서 D5로
In1에서 D9로
In2에서 D10으로
In3에서 D8로
In4에서 D7로
12v 전원 핀은 배터리의 양극에 연결되고 5v는 Arduino에 연결되며 두 Gnd는 함께 연결됩니다.
모터는 전진/후진 이동을 위해 출력 핀에 연결됩니다.
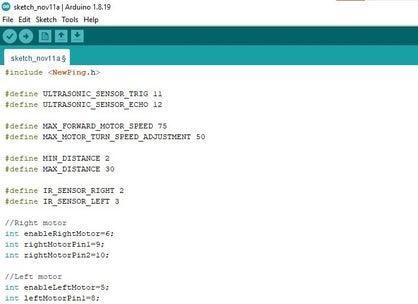
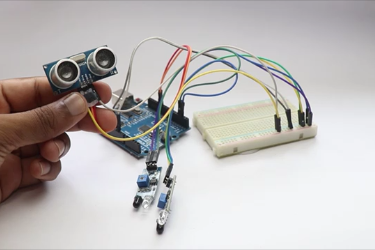
초음파 센서(HC-SR04) 연결
VCC 및 GND는 브레드 보드의 5V 및 GND에 연결됩니다.
TRIG와 ECHO는 Arduino의 각각의 디지털 핀 11과 12에 연결됩니다.
IR 센서 연결
VCC, GND는 5V 및 GND에 연결되는 반면 디지털 핀은 Arduino의 D2 및 D3에 연결됩니다.
이러한 연결이 완료되면 arduino 보드를 컴퓨터에 연결하고 IDE를 열고 아래 코드를 붙여넣어 업로드합니다
업로드하기 전에 라이브러리를 확인하십시오. 코드 업로드가 완료된 후 손을 가까이 가져갈 때 IR 센서가 빛나는지 확인하십시오.
첨부 파일

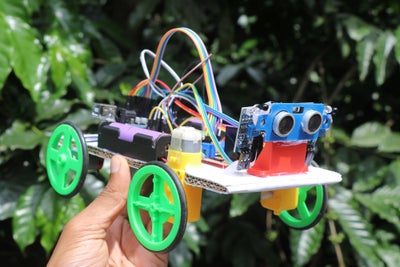
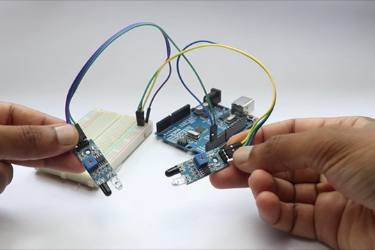
3단계: 전자 제품 조립
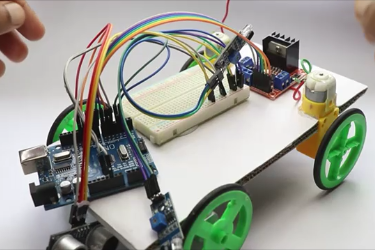
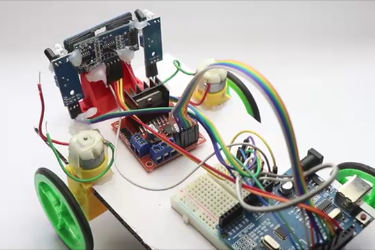
회로를 준비한 후에는 판지 프레임에 놓기 전에 모든 연결을 다시 확인하십시오.
필요한 경우 양면 접착제와 뜨거운 접착제를 사용하고 뜨거운 접착제로 조인트를 밀봉하십시오 (절연체로 사용)
여기서 당신은 초음파 감지기가 IR 감지기 사이에서 두어야 한다는 것을 주의해야 한다, 나는 나가 이전에 인쇄한 몇몇 플라스틱 부속을 이용했다, 당신은 이 목적을 위해 또한 대체 물자를 이용할 수 있다.
구성 요소를 밀봉하고 뜨거운 접착제를 사용하는 경우 완전히 건조되도록 한 다음 이 단계의 두 번째 이미지를 참조하여 구성 요소의 배치를 올바르게 확인할 수 있습니다.
모터 와이어를 드라이버에 연결하고 드라이버로 나사를 고정하고 이러한 연결은 손상되지 않아야 합니다
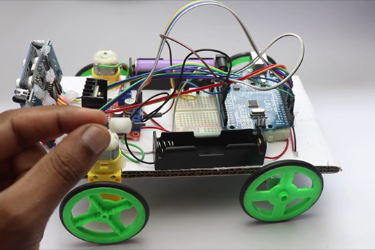
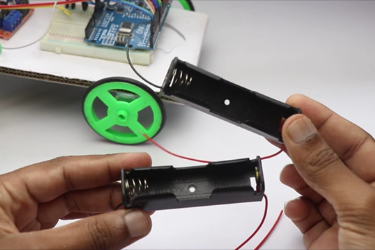
이 로봇 자동차에 전원을 공급하기 위해 2개의 개별 단일 18650 배터리 홀더를 사용할 것이며, 이는 로봇의 무게 균형을 맞추기 위해 의도적으로 수행되었습니다.
스위치를 사용하여 전원 공급 장치를 제어하고 이것이 자동차 프레임에 추가되었으며 배터리를 케이스에 추가하면 이제 로봇을 테스트 할 준비가되었습니다.
임프 발표!
취미 프로젝트나 산업을 위한 구성 요소를 원한다면 JLCMC를 확인하는 것이 좋습니다. 그들은 고품질 구성 요소를 많이 보유하고 있으며 그들의 서비스는 놀랍습니다
그들은 현재 처음 사용자를 위해 $19 쿠폰을 제공하고 있습니다 서둘러 사라지기 전에 잡아라.
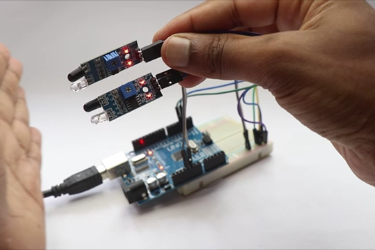
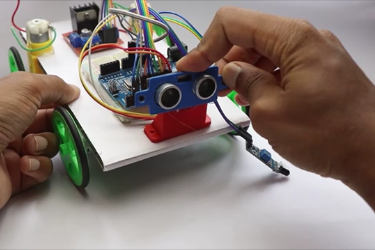
4 단계 : 사용 방법
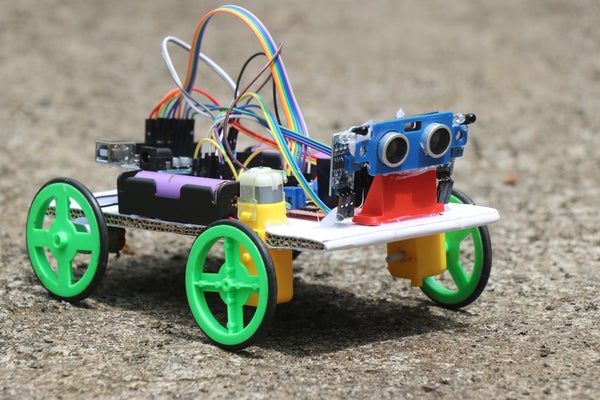
이것을 사용하는 것은 매우 쉽고 누구나 사용할 수 있고 학습과 함께 많은 재미를 느낄 수 있다고 말하고 싶습니다.
이 프로젝트에 전원을 공급하기 위해 2개의 리튬 이온 배터리를 사용했는데 스위치를 켜기만 하면 전원이 켜져 있음을 나타내는 특정 표시기가 없습니다.
Arduino 보드와 모터 드라이버의 LED를 보고 상태를 확인할 수 있으며, 이제 센서 앞에 손이나 물체를 놓아 로봇을 사용자 쪽으로 이동할 수 있습니다.
이제 물체가 왼쪽 IR 센서 앞에 오면 로봇은 해당 방향으로 이동하며 오른쪽 IR 센서도 마찬가지입니다.
전위차계를 사용하여 IR 센서의 감도를 조정할 수 있으며, 이는 로봇이 응답해야 하는 거리를 유지하는 데 도움이 됩니다.
제 경우에는 전위차계를 약 7cm로 설정했는데, 이는 약 7cm의 센서에 손을 가까이 대면 로봇이 당신을 따라가기 시작하고 손을 정말 멀리 움직이면 다음이 끝난다는 것을 의미합니다.
이것은 이 인간 추종 로봇에 관한 모든 것이었고, 질문이 있으면 댓글에 물어보세요, 감사합니다 그리고 이 프로젝트를 만드는 것을 잊지 마세요.
이 안내를 통해 Arduino를 사용한 인간 추적 로봇 프로젝트를 성공적으로 완성하시길 바랍니다. 많은 실무 경험과 함께 창의적인 로봇 공학의 세계를 즐기세요.
'로봇프로젝트' 카테고리의 다른 글
| 이륜 셀프 밸런싱 로봇 (0) | 2025.03.17 |
|---|---|
| 태양열 장애물 회피 자동차 (3) | 2024.11.01 |
| 아두이노를 이용한 자가 연주 우쿨렐레 로봇 (0) | 2024.09.19 |
| DC 모터를 사용하는 Doodlebot (1) | 2024.09.03 |
| 체이스 탱크 로봇 만들기 (0) | 2023.12.11 |



